


“线程”中讨论的其它部件:DRV5012,TMAG5111
传统的百叶窗被用来遮挡透过窗户的光线,为建筑物遮挡阴影。 通过在窗户和建筑物的其他部分之间设置屏障,它可以帮助保持室内温度,并节省供暖和制冷成本。 这些遮阳帘通常通过手动拉绳或直接拉在遮阳帘上来降低。 电动车窗遮阳帘通过将电机连接到滚轮上,该滚轮由遥控器或手机应用程序控制,该应用程序向遮阳帘发送信号以向上,向下移动或移动到预设位置,从而使车窗遮阳帘易于使用。 下图显示了电动车窗遮阳帘中霍尔效应传感器系统的功能图。
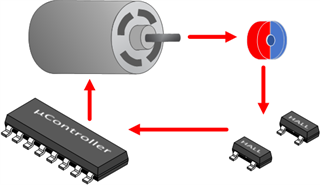
电动遮阳帘需要不断了解其位置,因此在任何方向到达行程末端时,电机都不会受到张力。 遮阳帘还需要识别手动下拉的时间,以便当前位置的行程结束不会移动。 当用户远程降低遮阳帘时,这一点尤为重要,如果电机张力太大,可能不够近,无法发出警报。
霍尔效应闩锁可以通过执行一项称为旋转编码的功能来提供准确的位置数据。 增量旋转编码器将旋转移动转换为电信号,从而更精确地控制自动化系统。 随着旋转的发生,增量编码器产生交替的高和低脉冲,这些脉冲可能指示旋转物体的速度和方向。 在电动车窗遮阳帘中,霍尔效应锁扣可以跟踪连接到电机轴上的环形磁铁的极性变化。 这将指示电机的旋转次数,此信息将允许系统了解遮阳帘的速度和位置。 在这种应用中,阴影将沿两个不同的方向移动,可以使用两个单轴闩锁或一个二维闩锁来指示遮阳帘的位置。
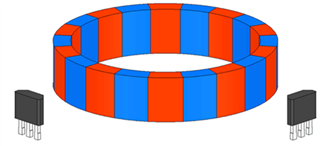
当使用两个单轴锁条(如 DRV5012)来确定方向时,精确放置传感器以获得最佳的90度 正交 偏移非常重要。 当传感器 被 每个磁 极的一半长度加上 任意整数的磁极长度隔开时,就会获得90度偏移。 拥有理想的90度偏移量可最大化每个状态之间的正时边界,从而防止机械公差,传感器不匹配和信号抖动导致的错误。 下面的输出信号是一个2位正交输出的示例,它清楚地显示了四种不同的状态。

如果在检测方向变化时出错,这可能导致电动遮阳帘失去其位置并错误地检测行程结束。 下图显示了与环形磁铁相关的传感器配置,以实现90度偏移。
DRV5012器件是一个超低功耗数字锁扣霍尔效应传感器,具有引脚可选采样率,推荐用于电压受限的应用,如电池供电的车窗遮阳帘。
另一种解决方案是使用2D 霍尔效应闩锁,如 TMAG5110或 TMAG5111,进一步简化了设计,并在传感器放置方面提供了更大的灵活性。 通过集成对磁场矢量正交组件敏感的第二个霍尔元件,可以使用一个设备来测量旋转磁铁的速度和方向。 这是可能的,因为磁铁产生的磁场部件的自然效应离相位90度。 这可以消除由于放置两个单轴传感器而可能出现的任何错误。 下图突出显示了使用2D 闩锁时传感器和磁铁放置的灵活性。
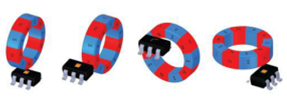
与使用两个单轴闩锁相比,使用一个2D 闩锁并减少电路板空间。 这对尺寸受限的应用(如电动车窗遮阳帘)是有益的。 TMAG5110有两个输出信号,代表每个独立霍尔元件的响应。 为了进一步简化您的设计,TMAG5111还具有两个输出响应,分别代表磁铁的速度和方向。
