大家好。
我正在使用我设计的 IWR6843AOP 板进行开发。
我在检查线性调频脉冲配置时有疑问。
在我的检查情形中、
我使用了 Area_scanner_68xx_AOP.cfg (C:\ti\mmwave_industrial_toolbox_4_11_0\labs\Area_Scanner \啁 啾_configs)
您可以看到配置
%(%
为区域扫描仪 v2.0.x 创建的百分比
%频率:60
%平台:xWR68xx
%方位角分辨率(度):15 +仰角
%距离分辨率(m):0.0703
%最大不模糊距离(m):14.4
%最大径向速度(m/s):2.45
%径向速度分辨率(m/s):0.15
%帧持续时间(msec):100
%(%
%" 标准毫米波 SDK 命令******
sensorStop
FlushCfg
DfeDataOutputMode 1
通道配置15 7 0
ADCfg 2 1.
adcbufCfg -1 0 1 1 1
ProfileCfg 0 60.5 100 25 69 0 50 1 256 6000 0 30
…
1-1)
这些参数是在上面写入的值中选择的
%距离分辨率(m):0.0703
%最大不模糊距离(m):14.4
%最大径向速度(m/s):2.45
%径向速度分辨率(m/s):0.15
之后、我将这些值放在毫米波传感估算器上
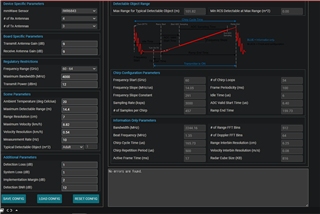
因此、当我计算它时、最大距离值与设定值不同。
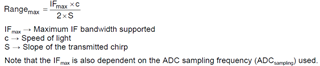
电流
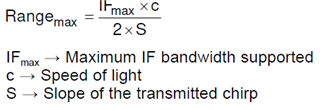
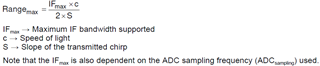
range_max=(3000k*3*10^8)/(2*14.05MHz/us)=32.03m
我将最大检测距离设置为14.4m、为什么会获得该结果?
我缺少什么?
1-2)进行实验时、测量值为10m。
在我看来、目标值(14.4m (最大不模糊距离)与实验结果之间的差异太大。
1-3)
这些参数是在上面写入的值中选择的
%距离分辨率(m):0.0703
%最大不模糊距离(m):14.4
%最大径向速度(m/s):2.45
%径向速度分辨率(m/s):0.15
什么是不同 的不模糊距离和最大距离?
这是否意味着超出不模糊 范围的测量值不准确? 或者、您是说它无法检测到吗?
示例)我是指最大距离为32.03m、 但不模糊距离为14.4m
我站在18米处是否意味着。 传感器是否未检测到它? 还是检测、但距离精度低?
(测量值是否为10m、20m 等,超出误差范围而不是18m?)
如何计算 不模糊的距离?
1-4) 当我计算标准毫米波 SDK 命令和目标值时、目标值和标准毫米波 SDK 命令会有所不同
%" 标准毫米波 SDK 命令******
sensorStop
FlushCfg
DfeDataOutputMode 1
通道配置15 7 0
ADCfg 2 1.
adcbufCfg -1 0 1 1 1
ProfileCfg 0 60.5 100 25 69 0 50 1 256 6000 0 30
fs=6000ksps
S=50MHz/us
因此 Range_max=(6000K*3*10^8)/(2*50MHz/us)=18m
我在这里有两个问题
1-4-1)因为问题"1-3) 什么是不同的不模糊距离和最大距离?"
因此、是否存在差异?
1-4-2) 为什么"毫米波传感估算器"的值与"标准毫米波 SDK 命令"不同
---- 毫米波传感估算器---
fs=3000ksps
S=14.05MHz/us
---- 标准毫米波 SDK 命令--
fs=6000ksps
S=50MHz/us
哪一个是正确的?
谢谢
此致