主题中讨论的其他器件: IWR6843
您好!
我将使用"68xx_3D_people_Counting"实验和 "mmWave_People_Counting_GUI.exe"包提供的"visualer"工具(mmWave_People_Counting_GUI.exe)来测试 IWR6843AOPEVM 的性能。
下面是我在可视化工具中加载的自定义配置文件:
(
sensorStop
FlushCfg
DfeDataOutputMode 1
通道配置15 7 0
ADCfg 2 1.
adcbufCfg -1 0 1 1 1
低功耗0 0
ProfileCfg 0 60 80 7 27 0 120 1 250 12500 0 30
线性调频脉冲配置0 0 0 0 0 0 0 0 1
线性调频脉冲配置1 1 0 0 0 0 2
线性调频脉冲配置2 2 0 0 0 0 4
帧配置0 2 128 0 41.388 1 0
DynamicRACfarCfg -1 4 4 2 4 8 16 4 4.00 0.50 4.50 1
StaticRACfarCfg -1 4 2 4 8 16 4 6 12.00 0.30 13.00 0
DynamicRangeAngleCfg -1 0.75 0.0010 1 0
Dynamic2DAngleCfg -1 1.5 0.0300 1 0 0.50 0.85 8.00
StaticRangeAnglCfg -1 8 4.
antGeometry0 -1 0 -3 -3 -2 -1 0 0
antGeometry1 -1 0 -1 0 -3 -2 -3 -2 -3 -3 -3 -2 -3 -3 -3 -3 -3 -3 -3 -2 -3 -2
antPhaseRot 1 -1 -1 -1 -1 -1 -1 -1 -1 1 -1 -1 -1 -1 -1 -1
fovCfg -1 70.0 20.0
CompRangeBiasAndRxChanPhase 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
StaticBoundaryBox -1 2 5 -1.1 2.
boundaryBox -1.5 2.5 0.3 6-1.1 2.5
sensorPosition 1.1 0 0
gatingParam 3 2 2 0
州参数3 3 10 40 5
分配参数0 800 0.1 15 0.1 20
跟踪配置1 2 1000 20 67 105 41.388
sensorStart
(二
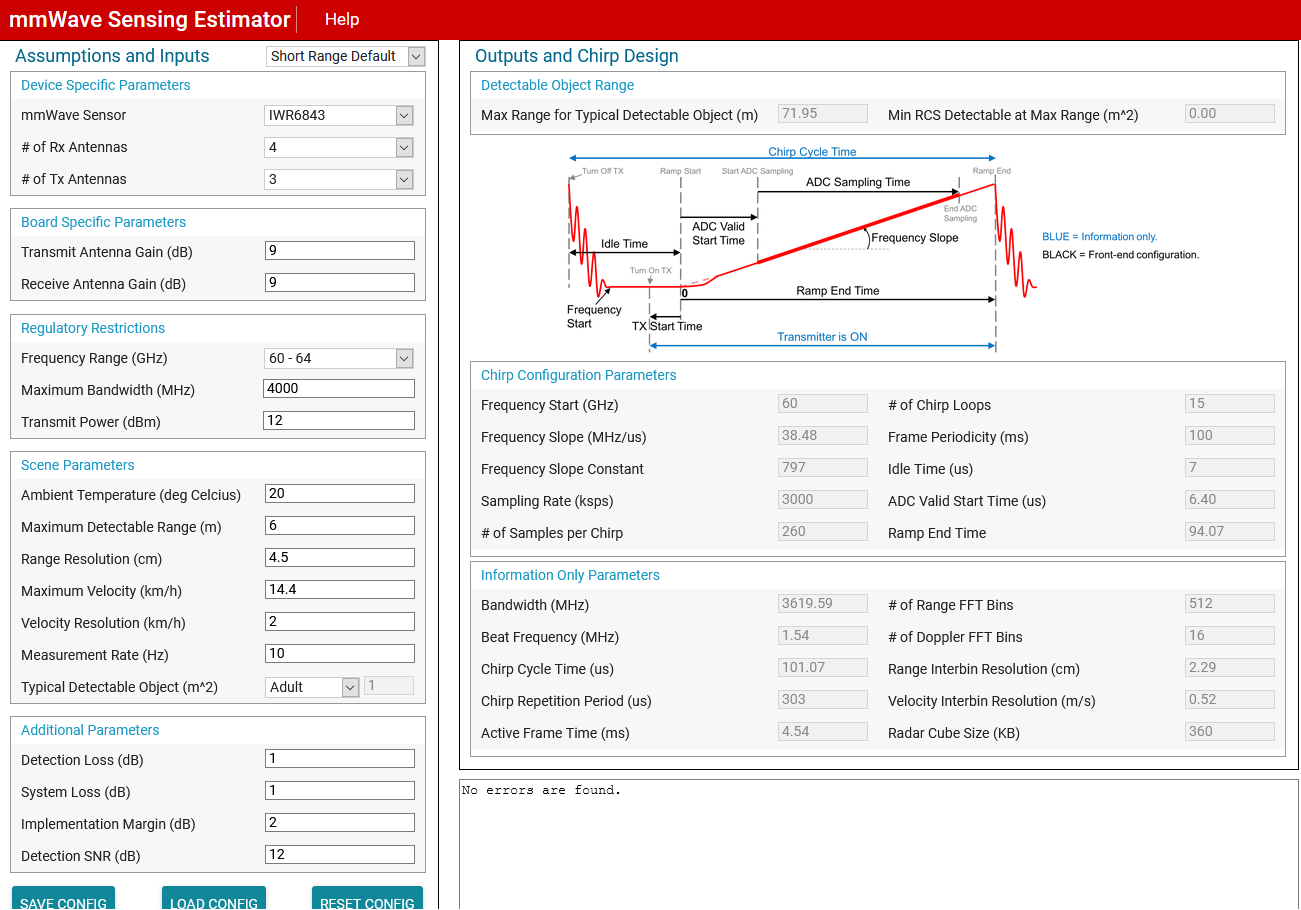
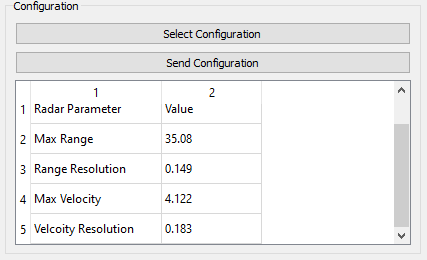
可视化工具计算的最大距离为14.06米
使用以下 FMCW 雷达理论公式、我得到:
最大距离= (FS * TC * c)/(4 * B)= 7.8125 m <<<< 不同的值
其中:
- FS = ADC 采样频率(ksps)= 12500000 Complex 采样/秒
- TC = ADC 采样时间= ADC 采样数/ fs = 20 μ s
- C =光速= 3*10^8m/s
- b =带宽=频率斜率* TC = 2.4GHz
我以与计算器中使用的值相同的颜色突出显示并在配置文件中报告。
这是什么问题?
此致、
Lorenzo