

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK 您好、TI 团队、
我使用 TI IWR6843ISK 来获得 TLV 1、7、8、9、10、 11数据。 我能够使用自己的算法获取数据、但我想了解更多有关使用 RGB 摄像头传感器等其他传感器进行雷达校准的信息、以便进行测试/评估。
例如:
我已检测 到来自此场景的静态和动态物体、 并记录其静态数据(X、Y、Z)点、并 以以下方式记录动态数据(距离、角度、仰角)点:
场景: 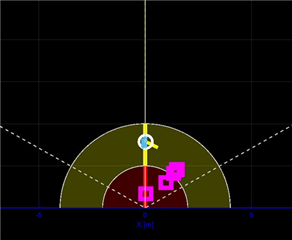
数据: 
- 查询1:毫米波雷达如何检测物体和人并提供静态和动态数据。
- 例如:如果我在 雷达前方有一个人走动的动态物体、并且有一个像 纸板 这样的静态物体、上面有铝 箔等反射材料、那么我就能够 检测到静态物体及其受尊重的 X、Y、 Z 点已记录、但我无法理解纸板的哪一部分 被考虑
- 它是纸板的中心吗? 或者 其他什么?
- 查询2:动态数据相同:如果 检测到人在 雷达传感器前面走动、则 会记录他们的动态点、但我没有 获得相关的信息文档来了解 这些点的定位方式以及雷达传感器如何针对人进行定向
- 考虑人体的哪一点? TI 雷达传感器何时检测到人?
- 问题3:能否在 毫秒内提及毫米波 TI IWR6843ISK EVM 板的周期时间? 有什么价值? 请为此共享相关文档 ?
- 查询4:请提供更多文档,了解 TI 区域扫描仪实验室实施的静态检测算法和组跟踪算法。
我有以下链接 :https://dev.ti.com/tirex/explore/content/mmwave_industrial_toolbox_4_10_1/labs/Area_Scanner/docs/area_scanner_users_guide.html#work-with-gui-source-code ,但它不会指向雷达传感器在检测静态和动态物体时的焦点的任何位置。
期待您的回应。
请告诉我、您是否需要我的结尾处的任何信息
此致、
Shravya
