

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV401 主题中讨论的其他器件: DRV411
您好、
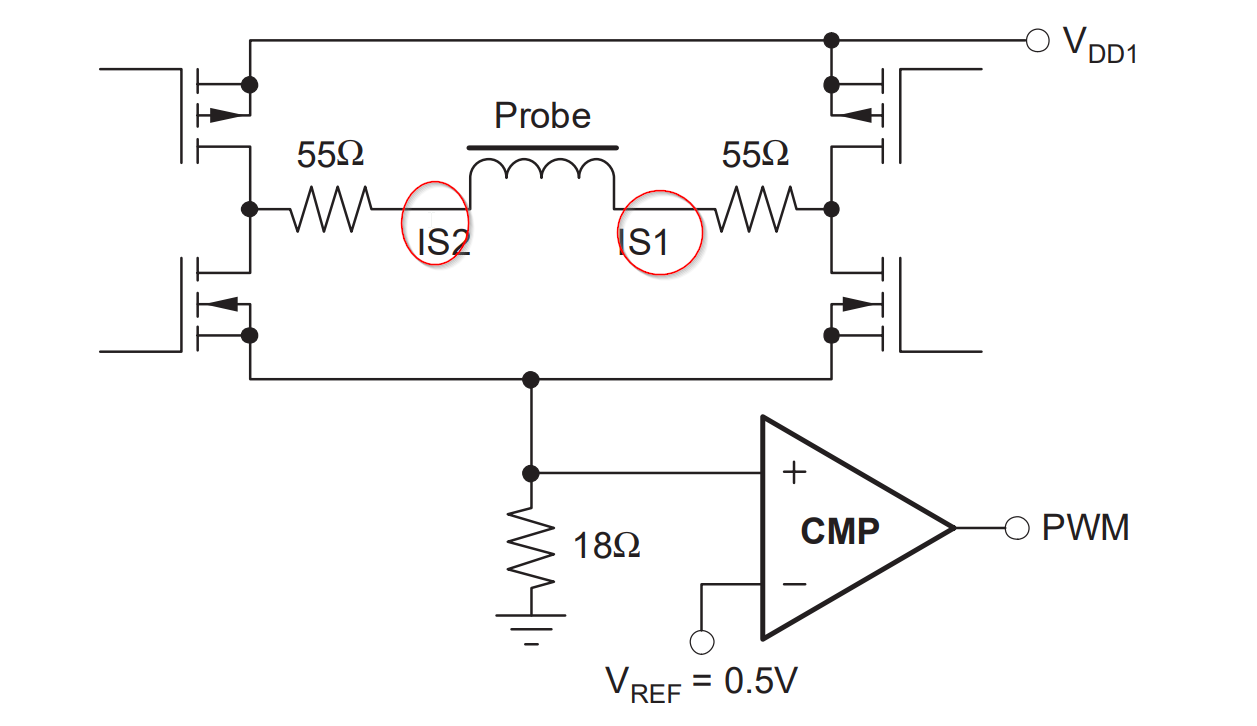
我正在尝试了解 DRV401如何与磁性元件和 探头设计协同工作。
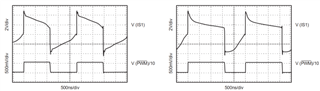
DRV401提供 IS1/IS2作为探头接口、但它没有说明探头的外观、仅显示以下探头电流波形。
我的三个问题是:
①how 此探针(正常工作的可饱和电感器)由 DR401激励和偏置? 我无法通过数据表中50%占空比 IS1波形来形象地描述激励源是什么样子。
②Is PWM 占空比或宽度、 与初级侧输入电流完全成正比? 如何确保这一原则?
③I 已了解到闭环磁通门可以实现 非常高的精度、 不过、在数据表中找不到要求的精度、TI 也有闭环 AFE DRV411、 与 DRV401非常相似、 唯一的区别是探头 (磁通门或霍尔元件)、第一页的精度声明为最大0.2%、我只是想知道这两种方案之间的精度差异是多少?
就像我理解的、闭环电流互感器 的结构是完全一样的、关键点应该是探头开环精度、能够更准确地报告零磁通、对不对?
非常感谢您的友好帮助和解释。

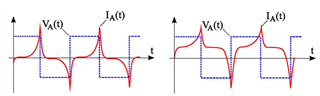 (当 IP=0时,左侧为 IP>0时,右侧为 IP>0)
(当 IP=0时,左侧为 IP>0时,右侧为 IP>0)