


请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TIDA-00913 主题中讨论的其他器件: INA240、 TMS320F28069M
您好!
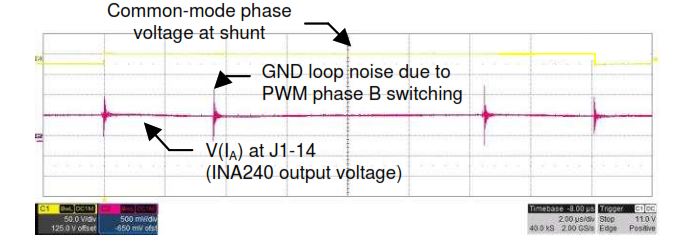
TIDA-00913参考设计中的图片如下:
我对此有一些疑问:
1-)为了避免在 INA240的输出中读取这些瞬态事件、我们可以做些什么?
2-) INA240的稳定时间为9.6-9.8微秒。 这是仅针对 PWM 信号边沿(从低电平变为高电平或从高电平变为低电平)的稳定时间;换言之、如果我们读取 PWM 信号中间的电流、我们应该考虑这一稳定时间(采集窗口为9.8微秒) 或者我们可以立即读取电流(最小采集窗口)?
此致、
Mohammad。
