请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:CC1310 主题中讨论的其他器件:TMP112、
IC:CC1310F128RHB
用例:rfEasyLinkTX....nortos_css
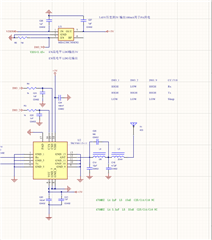
我的演示射频 PA SKY66115, LDO 控制 SKY66115电源,LDO EN 为 IOID_9。
ioID_8为 tmp112 功率
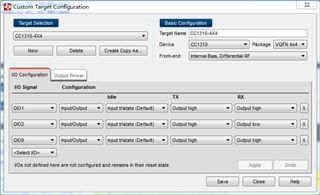
我的演示 MCU 使用引脚 IOID_2,IOID_1 ,IOID_9,IOID_8 ,
我目前只达到 GPIO 高-->发送数据--> 睡眠
但消耗电流相对较大、无法满足实际使用要求
程序假设:
CC1310 系统通电并进入睡眠状态--> GPIO high--> 发送数据
--> GPIO 关闭--> 休眠
Q1.如何关闭 CC1310 GPIO 控制逻辑
Q2.用例:rfEasyLinkTX ... tirtos_css 更合适
但休眠电流必须满足瞬态保护的

 我
我