Part Number: TMS320F280049
Other Parts Discussed in Thread: ADS131M06, C2000WARE
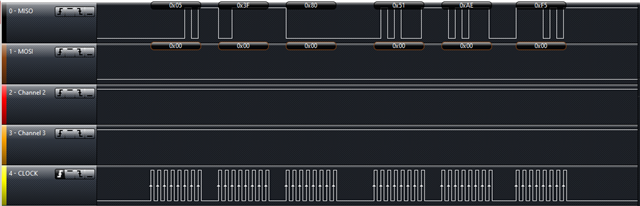
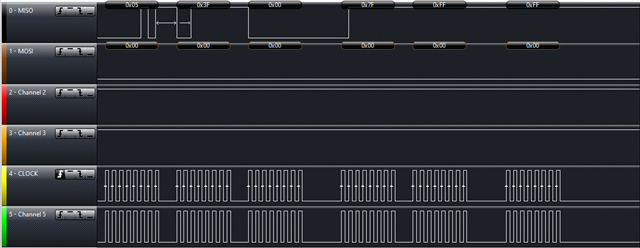
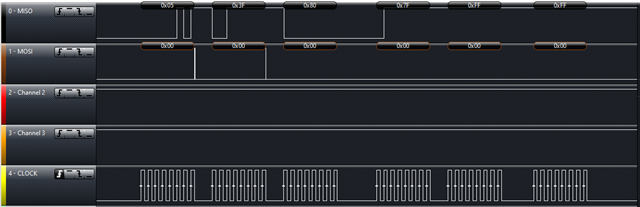
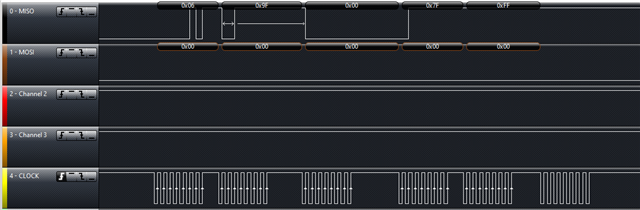
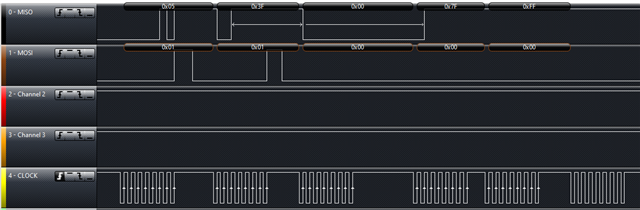
MCU SPI能输出时钟信号,SOMI能接收外部输入信号,但是SIMO无输出信号,一直为0
IO映射:
RESET :GPIO56
DRDY :GPIO27
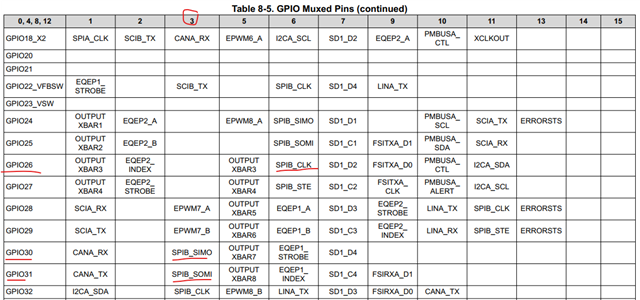
SCLK :GPIO26
SOMI :GPIO31
SIMO :GPIO30
SPI从设备为ads131m06,不管mcu发出什么数据,SIMO上捕获到的数据总是0.
将GPIO30配置为普通IO,可以控制其高低电平。
请帮忙看看是哪里出了问题
初始化SPI代码:
void SPI_Initialize(void)
{
SpibRegs.SPICCR.bit.SPISWRESET = 0; //spi reset to configuration mode
SpibRegs.SPICCR.bit.CLKPOLARITY = 0; //DOut on falling Edge,Din on rising Edge
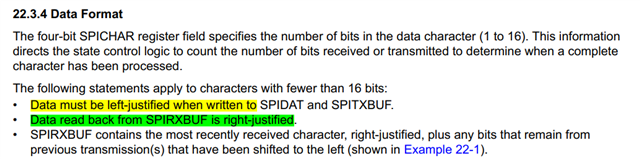
SpibRegs.SPICCR.bit.SPICHAR = (8-1); //16-bit word
SpibRegs.SPICCR.bit.SPILBK = 0; //loopback disabled
SpibRegs.SPICTL.bit.MASTER_SLAVE = 1; //Master
SpibRegs.SPICTL.bit.TALK = 1; //Transmit Enable
SpibRegs.SPICTL.bit.CLK_PHASE = 0; //normal clocking scheme,no delaying
SpibRegs.SPICTL.bit.SPIINTENA = 0; //Interrupt Disable
SpibRegs.SPIBRR.bit.SPI_BIT_RATE = SPI_BRR; //500kbps
SpibRegs.SPIPRI.bit.FREE = 1; //Halting on a breakpoint will not halt the SPI
DELAY_US(10);
//b15,SPIRST =1,resume FIFO to transmit or receive
//b14,SPIFFENA =1,enable FIFO
//b13,TXFIFO =1,release TX FIFO from reset
//b6,TXFFINTCLR =1,clear SPIFFTX[TXFFINT] flag
//b4~b0,TXFFIL =4,generate TX FIFO interrupt when there are less than 4 words in TX buffer
SpibRegs.SPIFFTX.all = 0xE040;
//b13,RXFIFORESET=1,re-enable RXFIFO
//b6,RXFFINTCLR =1,clear SPIFFRX[RXFFINT] flag
//b4-b0,RXFFIL = F,generate RX FIFO intterupt when there are more than 15 words in RX buffer
SpibRegs.SPIFFRX.all = 0x204F;
//no delay between every transfer from FIFO transmit buffer to transmit shift register
SpibRegs.SPIFFCT.all = 0x0;
SpibRegs.SPICCR.bit.SPISWRESET = 1; //Release the SPI from reset
SPI_InitGpio();
}
//
// InitSpiGpio - Initialize SPIA GPIOs
//
void SPI_InitGpio()
{
EALLOW;
GpioCtrlRegs.GPAPUD.bit.GPIO30 = 0; // Enable pull-up (SPISIMO)
GpioCtrlRegs.GPAPUD.bit.GPIO31 = 0; // Enable pull-up (SPISOMI)
GpioCtrlRegs.GPAPUD.bit.GPIO26 = 0; // Enable pull-up (SPICLK)
GpioCtrlRegs.GPAPUD.bit.GPIO27 = 0; // Enable pull-up (SPISTE)
GpioCtrlRegs.GPAQSEL2.bit.GPIO30 = 3; // Asynch input (SPISIMO)
GpioCtrlRegs.GPAQSEL2.bit.GPIO31 = 3; // Asynch input (SPISOMI)
GpioCtrlRegs.GPAQSEL2.bit.GPIO26 = 3; // Asynch input (SPICLK)
GpioCtrlRegs.GPAQSEL2.bit.GPIO27 = 3; // Asynch input (SPISTE)
GpioCtrlRegs.GPAGMUX2.bit.GPIO30 = 0; //0x3
GpioCtrlRegs.GPAMUX2.bit.GPIO30 = 3; //SPIB_SIMO
GpioCtrlRegs.GPAGMUX2.bit.GPIO31 = 0; //0x3
GpioCtrlRegs.GPAMUX2.bit.GPIO31 = 3; //SPIB_SOMI
GpioCtrlRegs.GPAGMUX2.bit.GPIO26 = 1; //0x6
GpioCtrlRegs.GPAMUX2.bit.GPIO26 = 2; //SPIB_CLK
GpioCtrlRegs.GPAGMUX2.bit.GPIO27 = 0; //
GpioCtrlRegs.GPAMUX2.bit.GPIO27 = 0; //
GpioCtrlRegs.GPADIR.bit.GPIO27 = 0; // Input
GpioCtrlRegs.GPAPUD.bit.GPIO27 = 0; // Enable pull-up /DRDY
GpioCtrlRegs.GPACTRL.bit.QUALPRD3= 0x3;//6 SYSCLK cycles
GpioCtrlRegs.GPBGMUX2.bit.GPIO56 = 0;
GpioCtrlRegs.GPBMUX2.bit.GPIO56 = 0;
GpioCtrlRegs.GPBPUD.bit.GPIO56 = 0; // Enable pull-up (SPI /RESET)
GpioCtrlRegs.GPBDIR.bit.GPIO56 = 1; // Output
GpioDataRegs.GPBSET.bit.GPIO56 = 1; // High
// GpioDataRegs.GPBCLEAR.bit.GPIO56 = 1; // Low,保持复位状态
//GpioCtrlRegs.GPAGMUX2.bit.GPIO30 = 0; //0
//GpioCtrlRegs.GPAMUX2.bit.GPIO30 = 0; //GPIO30
//GpioCtrlRegs.GPADIR.bit.GPIO30 = 1; // Output
EDIS;
}