Part Number: TMS320F280025C-Q1
Other Parts Discussed in Thread: C2000WARE
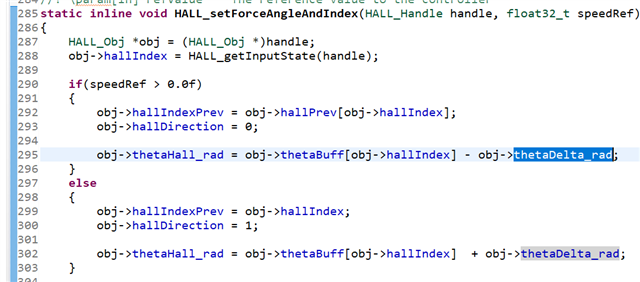
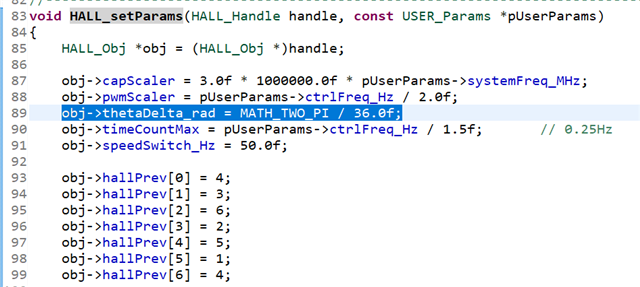
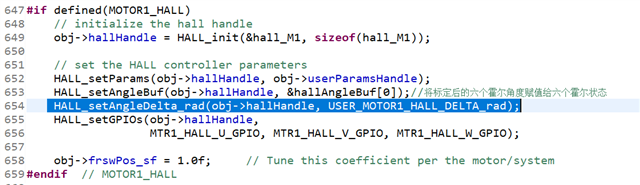
我在运行C2000Ware_MotorControl_SDK_5_00_00_00\solutions\universal_motorcontrol_lab实验例程,选择的是HALL有感FOC,在hall.h头文件中,为什么当霍尔状态发生变化一次,角度的增量thetaDelta_rad要变化2Π/36,三相霍尔状态每变化一次,角度增量不应该是Π/6吗?
下面的第一张图位于hall.h文件中,第二张图位于hall.c文件中,第三张图位于motor1_drive.c中