


Other Parts Discussed in Thread: DRV8305
工程师您好,我用的是TMS320F28069M+DRV8305套件做Instaspin-FOC 实验11a,电机运行正常。我想要对代码进行改造,用编码器反馈的角度来代替无感,我在原来的工程下添加了Enc.c和QEP.c文件,添加了QEP预定义,添加了enc对象和句柄,并进行了初始化:


然后在角度和速度反馈部分作了如下图蓝色部分的更改:
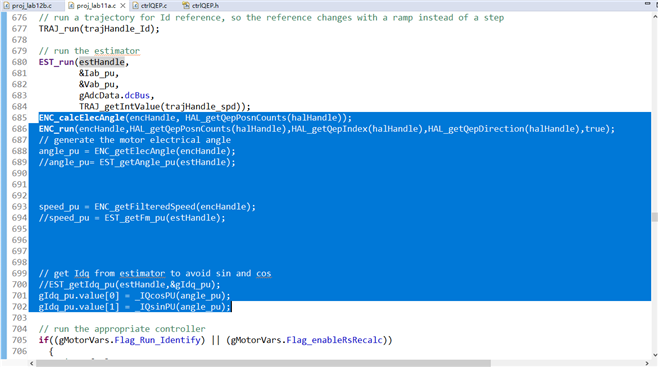
代码编译没有问题,但在运行的时候一上使能(gMotorVars.Flag_enableSys = 1),gMotorVars.Flag_Run_Identify = 0的情况下,电机就开始飞速旋转,不受控制,我不知道这是什么原因造成的,希望能得到您的帮助。谢谢!

