Part Number: AM2634
Other Parts Discussed in Thread: TCAN1042H
使用的MCAL版本: MCAL_AM263x_00.09.00_03
CCS版本: 12.0.0.00009
硬件:AM263x 控制卡评估模块 (EVM)
导入MCAL源代码编译通过,调试CanApp.c 使用MCAN1无法正常发送数据
EB重新配置port 模块生成代码
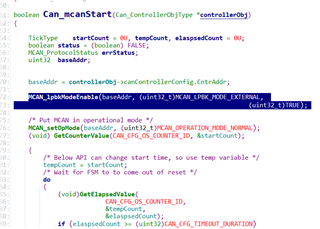
测试发现,需要修改Can_mcanStart 增加
MCAN_lpbkModeEnable(baseAddr, (uint32_t)MCAN_LPBK_MODE_EXTERNAL,(uint32_t)TRUE);
才能正常发数据,因为这个代码为MCAL底层代码,修改是不符合要求的。
因此还想确认下还有没有其他可能的原因?
MCAL 例子初始化函数是否有BUG?
另外想请求TI support 能否提供MCAL基于CCS的测试工程?我们现在是在没有任何参考下新建的工程,不确定是否有疏漏,或者不合理的地方。