





机器人技术是今后发展一个主方向,代替传统体力劳动,个人认为主要应用方向有:军事领域、消防安全、工业应用、家庭服务机器人等等 。机器人是一个非常复杂的系统,它包含了各种伺服电机,由于动力系统最耗电的部分就是电机,所以降低电源转换损耗对于降低机器人的额外损耗具有非常重要的意义。市面上伺服电机驱动的方案非常多,很多却无法同时提供高效、低纹波和大功率功能,PMP15025 能在24V输入,5V/4A,390Khz的负载下效率可达90%,满负载的输出纹波为4.44mV,此为电机的动力驱动提供了非常好的方案和选择,机器人目前市价普遍偏高,普及及价格有待进一步平衡。
Other Parts Discussed in Thread: PMP15025, TIDA-00982, BQ4050
众所周知,动力系统是最耗电的,比如从前我们用过的录音机随身听,电池电力消耗很快,当不能驱动录音机后,那电池还可以正常的给收音机供电,给手电筒供电等。
在工业机器人和电机驱动上也是一样,运动系统可谓是最为耗电的,没有足够的电流驱动是没法提供所需电机驱动力。
TI为此推出了可提供24V 输入, 5V@4A输出的暴强驱动能力的参考设计。
————————————————————————————————————————————————————————————————

————————————————————————————————————————————————————————
描述
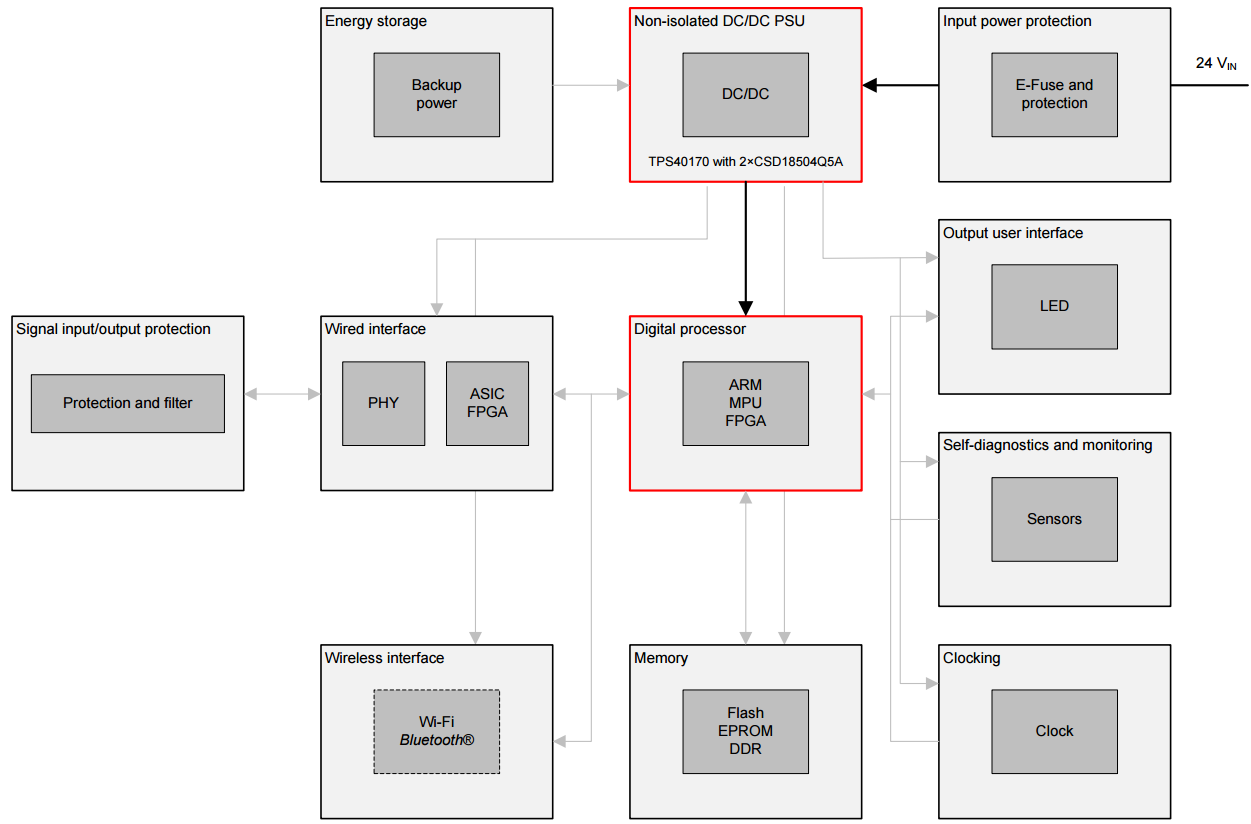
PMP15025 包含一个单相同步降压转换器,从 24V 输入提供稳定的 5V @ 4A 解决方案。此设计的特点是具有高效率和高功率密度,适用于工业自动化应用,例如机器人和电机驱动。
特性
- 在 24VIN,5V/4A,390kHz 下的效率为 90%
- 满负载电流下的输出纹波为 4.44mV
- 满负载电流下具有最小的相位振铃
- 30kHz 环路带宽,75° 相补角,具有快速、稳定的瞬态响应
——————————————————————————————————————————————————————————————————
参数
| PMP15025.1 (Output Voltage 1) | |
|---|---|
| Vin (Min) (V) | 20 |
| Vin (Max) (V) | 28 |
| Vout (Nom) (V) | 5 |
| Iout (Max) (A) | 4 |
| Output Power (W) | 20 |
| 隔离/非隔离 | Non-Isolated |
| 输入类型 | DC |
| 拓扑 | Buck- Synchronous |
——————————————————————————————————————————————————————————————

