


1.运行核(Operating core):mcu1_0
2.通过EB配置的文件Can_Cfg.h(files generated by EB):
#ifndef CAN_CFG_H_
#define CAN_CFG_H_
#include "Dem.h"
#ifdef __cplusplus
extern "C" {
#endif
/**
* \brief CAN Build Variant.
* Build variants.(i.e Pre Compile,Post Build)
*/
#define CAN_VARIANT_PRE_COMPILE (STD_ON)
/**
* \name Can Driver Configuration SW Version Info
*
* Pre-compile switches for enabling/disabling CAN MCAL APIs
* @{
*/
#define CAN_VERSION_INFO_API (STD_ON)
/*!< Enable/Disable Can_GetVersionInfo() */
#define CAN_DEV_ERROR_DETECT (STD_ON)
/*!< Enable/Disable DEV error detection */
#define CAN_SAFETY_DIAGNOSTIC (STD_ON)
/*!< Enable/Disable Can Safety Diagnostic */
//#define CAN_LOOPBACK_ENABLE (STD_ON)
#define CAN_LOOPBACK_ENABLE (STD_OFF)
/*!< Enable/Disable Can_TestLoopBackModeEnable() */
#define CAN_REGISTER_READBACK_API (STD_ON)
/*!< Enable/Disable Can_ConfigRegReadBack() */
#define CAN_WAKEUP_FUNCTIONALITY_API (STD_OFF)
/*!< Enable/Disable Can_CheckWakeup() */
#define CAN_MULTIPLEXED_TRANSMISSION_ENABLE (STD_ON)
/*!< Enable/Disable Multiplexed Transmission */
/**
* \brief Pre Compile config macro name.
*/
#define CAN_INIT_CONFIG_PC CanConfigSet
/*
* Design: MCAL-6116
*/
#define CAN_TX_POLLING (STD_OFF)
/*!< Enable/Disable Can_MainFunction_Write */
#define CAN_RX_POLLING (STD_OFF)
/*!< Enable/Disable Can_MainFunction_Read */
#define CAN_BUSOFF_POLLING (STD_OFF)
/*!< Enable/Disable Can_MainFunction_BusOff */
#define CAN_WAKEUP_POLLING (STD_OFF)
/*!< Enable/Disable Can_MainFunction_Wakeup */
/* @} */
#define CAN_NUM_CONTROLLER (10U)
/*!< Number of controllers defined*/
#define CAN_NUM_MAILBOXES (10U)
/*!< Number of mailboxes defined*/
/*!< Max number of controller instances per SOC */
#define CAN_MAX_CONTROLLER (20U)
#define CAN_MAX_MAILBOXES (64U)
/*!< Max number of mailboxes per controller */
#define CAN_ISR_TYPE (CAN_ISR_CAT1)
/*!< OSEK Category 1 ISR Type */
#define CLK_CAN_FD_FREQ (80U)
/*!< Clock source frequency CAN FD */
/**
* \name Can Controller Id names
*
* Defines for symbolic names for the CanControllerIds
* @{
*/
#define CanConf_CanController_CanController_0 (0U)
#define CanConf_CanController_CanController_1 (1U)
#define CanConf_CanController_CanController_2 (2U)
#define CanConf_CanController_CanController_3 (3U)
#define CanConf_CanController_CanController_4 (4U)
#define CanConf_CanController_CanController_5 (5U)
#define CanConf_CanController_CanController_6 (6U)
#define CanConf_CanController_CanController_7 (7U)
#define CanConf_CanController_CanController_8 (8U)
#define CanConf_CanController_CanController_9 (9U)
/* @} */
/* @} */
#define CAN_CONTROLLER_MCU_MCAN0
/*!< MCU_MCAN0 CONTROLLER INSTANCE */
#define CAN_CONTROLLER_MCAN1
/*!< MCAN1 CONTROLLER INSTANCE */
#define CAN_CONTROLLER_MCU_MCAN1
/*!< MCU_MCAN1 CONTROLLER INSTANCE */
#define CAN_CONTROLLER_MCAN10
/*!< MCAN10 CONTROLLER INSTANCE */
#define CAN_CONTROLLER_MCAN3
/*!< MCAN3 CONTROLLER INSTANCE */
#define CAN_CONTROLLER_MCAN4
/*!< MCAN4 CONTROLLER INSTANCE */
#define CAN_CONTROLLER_MCAN11
/*!< MCAN11 CONTROLLER INSTANCE */
#define CAN_CONTROLLER_MCAN12
/*!< MCAN12 CONTROLLER INSTANCE */
#define CAN_CONTROLLER_MCAN14
/*!< MCAN14 CONTROLLER INSTANCE */
#define CAN_CONTROLLER_MCAN16
/*!< MCAN16 CONTROLLER INSTANCE */
/** \brief MCAN16 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_18_Int0ISR(void);
#ifdef __cplusplus
}
#endif
#endif /*CAN_CFG_H__*/
Can_Cfg.c:
/*
*
* Copyright (c) 2023 Texas Instruments Incorporated
*
* All rights reserved not granted herein.
*
* Limited License.
*
* Texas Instruments Incorporated grants a world-wide, royalty-free, non-exclusive
* license under copyrights and patents it now or hereafter owns or controls to make,
* have made, use, import, offer to sell and sell ("Utilize") this software subject to the
* terms herein. With respect to the foregoing patent license, such license is granted
* solely to the extent that any such patent is necessary to Utilize the software alone.
* The patent license shall not apply to any combinations which include this software,
* other than combinations with devices manufactured by or for TI ("TI Devices").
* No hardware patent is licensed hereunder.
*
* Redistributions must preserve existing copyright notices and reproduce this license
* (including the above copyright notice and the disclaimer and (if applicable) source
* code license limitations below) in the documentation and/or other materials provided
* with the distribution
*
* Redistribution and use in binary form, without modification, are permitted provided
* that the following conditions are met:
*
* * No reverse engineering, decompilation, or disassembly of this software is
* permitted with respect to any software provided in binary form.
*
* * any redistribution and use are licensed by TI for use only with TI Devices.
*
* * Nothing shall obligate TI to provide you with source code for the software
* licensed and provided to you in object code.
*
* If software source code is provided to you, modification and redistribution of the
* source code are permitted provided that the following conditions are met:
*
* * any redistribution and use of the source code, including any resulting derivative
* works, are licensed by TI for use only with TI Devices.
*
* * any redistribution and use of any object code compiled from the source code
* and any resulting derivative works, are licensed by TI for use only with TI Devices.
*
* Neither the name of Texas Instruments Incorporated nor the names of its suppliers
*
* may be used to endorse or promote products derived from this software without
* specific prior written permission.
*
* DISCLAIMER.
*
* THIS SOFTWARE IS PROVIDED BY TI AND TI'S LICENSORS "AS IS" AND ANY EXPRESS
* OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
* OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED.
* IN NO EVENT SHALL TI AND TI'S LICENSORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY
* OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE
* OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED
* OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/***************************************************************************
Project: IDC_V1_EB24_Prj
Date : 2023-12-08 10:14:21
This file is generated by EB Tresos
Do not modify this file, otherwise the software may behave in unexpected way.
*****************************************************************************/
/*******************************************************************************
* INCLUDES
******************************************************************************/
#include "Can.h"
#include "Can_Cfg.h"
/*
* Design: MCAL-6077,MCAL-6079,MCAL-5907
*/
/* Version checking */
#if ((CAN_SW_MAJOR_VERSION != (9U))||(CAN_SW_MINOR_VERSION != (0U)))
#error "Version numbers of Can_Cfg.c and Can.h are inconsistent!"
#endif
/*******************************************************************************
* GLOBAL DATA
******************************************************************************/
#define CAN_START_SEC_CONFIG_DATA
#include "Can_MemMap.h"
/* Baud Rate Structure for all configsets */
static Can_BaudConfigType
CanConfigSet_CanController_0_CanControllerBaudrateConfig_0 =
{
500U, /* in Kbps */
4U, /* Prop Segement value */
8U, /* Phase Segment 1 */
3U, /* Phase Segment 2 */
3U, /* Sync jump width */
18U, /* Sum of all timing parameters */
10U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
2000U, /* in Kbps */
6U, /* Prop Segement value */
8U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
2U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
(boolean)TRUE, /* Specifies if the bit rate switching shall be used */
}
};
static Can_BaudConfigType
CanConfigSet_CanController_1_CanControllerBaudrateConfig_0 =
{
500U, /* in Kbps */
4U, /* Prop Segement value */
8U, /* Phase Segment 1 */
3U, /* Phase Segment 2 */
3U, /* Sync jump width */
18U, /* Sum of all timing parameters */
10U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
2000U, /* in Kbps */
6U, /* Prop Segement value */
8U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
2U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
(boolean)TRUE, /* Specifies if the bit rate switching shall be used */
}
};
static Can_BaudConfigType
CanConfigSet_CanController_2_CanControllerBaudrateConfig_0 =
{
500U, /* in Kbps */
4U, /* Prop Segement value */
8U, /* Phase Segment 1 */
3U, /* Phase Segment 2 */
3U, /* Sync jump width */
18U, /* Sum of all timing parameters */
10U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
2000U, /* in Kbps */
6U, /* Prop Segement value */
8U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
2U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
(boolean)TRUE, /* Specifies if the bit rate switching shall be used */
}
};
static Can_BaudConfigType
CanConfigSet_CanController_3_CanControllerBaudrateConfig_0 =
{
500U, /* in Kbps */
4U, /* Prop Segement value */
8U, /* Phase Segment 1 */
3U, /* Phase Segment 2 */
3U, /* Sync jump width */
18U, /* Sum of all timing parameters */
10U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
2000U, /* in Kbps */
6U, /* Prop Segement value */
8U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
2U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
(boolean)TRUE, /* Specifies if the bit rate switching shall be used */
}
};
static Can_BaudConfigType
CanConfigSet_CanController_4_CanControllerBaudrateConfig_0 =
{
500U, /* in Kbps */
4U, /* Prop Segement value */
8U, /* Phase Segment 1 */
3U, /* Phase Segment 2 */
3U, /* Sync jump width */
18U, /* Sum of all timing parameters */
10U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
2000U, /* in Kbps */
6U, /* Prop Segement value */
8U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
2U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
(boolean)TRUE, /* Specifies if the bit rate switching shall be used */
}
};
static Can_BaudConfigType
CanConfigSet_CanController_5_CanControllerBaudrateConfig_0 =
{
500U, /* in Kbps */
4U, /* Prop Segement value */
8U, /* Phase Segment 1 */
3U, /* Phase Segment 2 */
3U, /* Sync jump width */
18U, /* Sum of all timing parameters */
10U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
2000U, /* in Kbps */
6U, /* Prop Segement value */
8U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
2U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
(boolean)TRUE, /* Specifies if the bit rate switching shall be used */
}
};
static Can_BaudConfigType
CanConfigSet_CanController_6_CanControllerBaudrateConfig_0 =
{
500U, /* in Kbps */
4U, /* Prop Segement value */
8U, /* Phase Segment 1 */
3U, /* Phase Segment 2 */
3U, /* Sync jump width */
18U, /* Sum of all timing parameters */
10U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
2000U, /* in Kbps */
6U, /* Prop Segement value */
8U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
2U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
(boolean)TRUE, /* Specifies if the bit rate switching shall be used */
}
};
static Can_BaudConfigType
CanConfigSet_CanController_7_CanControllerBaudrateConfig_0 =
{
500U, /* in Kbps */
4U, /* Prop Segement value */
8U, /* Phase Segment 1 */
3U, /* Phase Segment 2 */
3U, /* Sync jump width */
18U, /* Sum of all timing parameters */
10U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
2000U, /* in Kbps */
6U, /* Prop Segement value */
8U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
2U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
(boolean)TRUE, /* Specifies if the bit rate switching shall be used */
}
};
static Can_BaudConfigType
CanConfigSet_CanController_8_CanControllerBaudrateConfig_0 =
{
500U, /* in Kbps */
4U, /* Prop Segement value */
8U, /* Phase Segment 1 */
3U, /* Phase Segment 2 */
3U, /* Sync jump width */
18U, /* Sum of all timing parameters */
10U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
2000U, /* in Kbps */
6U, /* Prop Segement value */
8U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
2U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
(boolean)TRUE, /* Specifies if the bit rate switching shall be used */
}
};
static Can_BaudConfigType
CanConfigSet_CanController_9_CanControllerBaudrateConfig_0 =
{
500U, /* in Kbps */
4U, /* Prop Segement value */
8U, /* Phase Segment 1 */
3U, /* Phase Segment 2 */
3U, /* Sync jump width */
18U, /* Sum of all timing parameters */
10U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
2000U, /* in Kbps */
6U, /* Prop Segement value */
8U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
2U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
(boolean)TRUE, /* Specifies if the bit rate switching shall be used */
}
};
/*List of the Baudrate structures */
static Can_BaudConfigType
*CanConfigSet_CanController_0_BaudRateConfigList[]=
{
&CanConfigSet_CanController_0_CanControllerBaudrateConfig_0,
};
static Can_BaudConfigType
*CanConfigSet_CanController_1_BaudRateConfigList[]=
{
&CanConfigSet_CanController_1_CanControllerBaudrateConfig_0,
};
static Can_BaudConfigType
*CanConfigSet_CanController_2_BaudRateConfigList[]=
{
&CanConfigSet_CanController_2_CanControllerBaudrateConfig_0,
};
static Can_BaudConfigType
*CanConfigSet_CanController_3_BaudRateConfigList[]=
{
&CanConfigSet_CanController_3_CanControllerBaudrateConfig_0,
};
static Can_BaudConfigType
*CanConfigSet_CanController_4_BaudRateConfigList[]=
{
&CanConfigSet_CanController_4_CanControllerBaudrateConfig_0,
};
static Can_BaudConfigType
*CanConfigSet_CanController_5_BaudRateConfigList[]=
{
&CanConfigSet_CanController_5_CanControllerBaudrateConfig_0,
};
static Can_BaudConfigType
*CanConfigSet_CanController_6_BaudRateConfigList[]=
{
&CanConfigSet_CanController_6_CanControllerBaudrateConfig_0,
};
static Can_BaudConfigType
*CanConfigSet_CanController_7_BaudRateConfigList[]=
{
&CanConfigSet_CanController_7_CanControllerBaudrateConfig_0,
};
static Can_BaudConfigType
*CanConfigSet_CanController_8_BaudRateConfigList[]=
{
&CanConfigSet_CanController_8_CanControllerBaudrateConfig_0,
};
static Can_BaudConfigType
*CanConfigSet_CanController_9_BaudRateConfigList[]=
{
&CanConfigSet_CanController_9_CanControllerBaudrateConfig_0,
};
/* Controller structure defined here for all config sets */
static Can_ControllerType
CanConfigSet_CanController_0 =
{
&CanConfigSet_CanController_0_CanControllerBaudrateConfig_0, /* pointer to default Baud structure */
CanConfigSet_CanController_0_BaudRateConfigList, /* List of available Baudrate structs */
};
static Can_ControllerType
CanConfigSet_CanController_1 =
{
&CanConfigSet_CanController_1_CanControllerBaudrateConfig_0, /* pointer to default Baud structure */
CanConfigSet_CanController_1_BaudRateConfigList, /* List of available Baudrate structs */
};
static Can_ControllerType
CanConfigSet_CanController_2 =
{
&CanConfigSet_CanController_2_CanControllerBaudrateConfig_0, /* pointer to default Baud structure */
CanConfigSet_CanController_2_BaudRateConfigList, /* List of available Baudrate structs */
};
static Can_ControllerType
CanConfigSet_CanController_3 =
{
&CanConfigSet_CanController_3_CanControllerBaudrateConfig_0, /* pointer to default Baud structure */
CanConfigSet_CanController_3_BaudRateConfigList, /* List of available Baudrate structs */
};
static Can_ControllerType
CanConfigSet_CanController_4 =
{
&CanConfigSet_CanController_4_CanControllerBaudrateConfig_0, /* pointer to default Baud structure */
CanConfigSet_CanController_4_BaudRateConfigList, /* List of available Baudrate structs */
};
static Can_ControllerType
CanConfigSet_CanController_5 =
{
&CanConfigSet_CanController_5_CanControllerBaudrateConfig_0, /* pointer to default Baud structure */
CanConfigSet_CanController_5_BaudRateConfigList, /* List of available Baudrate structs */
};
static Can_ControllerType
CanConfigSet_CanController_6 =
{
&CanConfigSet_CanController_6_CanControllerBaudrateConfig_0, /* pointer to default Baud structure */
CanConfigSet_CanController_6_BaudRateConfigList, /* List of available Baudrate structs */
};
static Can_ControllerType
CanConfigSet_CanController_7 =
{
&CanConfigSet_CanController_7_CanControllerBaudrateConfig_0, /* pointer to default Baud structure */
CanConfigSet_CanController_7_BaudRateConfigList, /* List of available Baudrate structs */
};
static Can_ControllerType
CanConfigSet_CanController_8 =
{
&CanConfigSet_CanController_8_CanControllerBaudrateConfig_0, /* pointer to default Baud structure */
CanConfigSet_CanController_8_BaudRateConfigList, /* List of available Baudrate structs */
};
static Can_ControllerType
CanConfigSet_CanController_9 =
{
&CanConfigSet_CanController_9_CanControllerBaudrateConfig_0, /* pointer to default Baud structure */
CanConfigSet_CanController_9_BaudRateConfigList, /* List of available Baudrate structs */
};
/* Controller structure defined here for all config sets */
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_0 =
{
CanConf_CanController_CanController_0, /* Id as provided by GUI */
(boolean)TRUE, /* Contoller is used=1 or not_used=0*/
0x40500000U, /* Can Controller Base Address */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Rx Processing Type */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Tx Processing Type */
(boolean)TRUE,/* BusOff TRUE = Interrupt FALSE = Polling */
CAN_CONTROLLER_INSTANCE_MCU_MCAN0, /* Controller Instance */
(boolean)TRUE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_1 =
{
CanConf_CanController_CanController_1, /* Id as provided by GUI */
(boolean)TRUE, /* Contoller is used=1 or not_used=0*/
0x2718000U, /* Can Controller Base Address */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Rx Processing Type */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Tx Processing Type */
(boolean)TRUE,/* BusOff TRUE = Interrupt FALSE = Polling */
CAN_CONTROLLER_INSTANCE_MCAN1, /* Controller Instance */
(boolean)TRUE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_2 =
{
CanConf_CanController_CanController_2, /* Id as provided by GUI */
(boolean)TRUE, /* Contoller is used=1 or not_used=0*/
0x40540000U, /* Can Controller Base Address */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Rx Processing Type */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Tx Processing Type */
(boolean)TRUE,/* BusOff TRUE = Interrupt FALSE = Polling */
CAN_CONTROLLER_INSTANCE_MCU_MCAN1, /* Controller Instance */
(boolean)TRUE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_3 =
{
CanConf_CanController_CanController_3, /* Id as provided by GUI */
(boolean)TRUE, /* Contoller is used=1 or not_used=0*/
0x27a8000U, /* Can Controller Base Address */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Rx Processing Type */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Tx Processing Type */
(boolean)TRUE,/* BusOff TRUE = Interrupt FALSE = Polling */
CAN_CONTROLLER_INSTANCE_MCAN10, /* Controller Instance */
(boolean)TRUE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_4 =
{
CanConf_CanController_CanController_4, /* Id as provided by GUI */
(boolean)TRUE, /* Contoller is used=1 or not_used=0*/
0x2738000U, /* Can Controller Base Address */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Rx Processing Type */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Tx Processing Type */
(boolean)TRUE,/* BusOff TRUE = Interrupt FALSE = Polling */
CAN_CONTROLLER_INSTANCE_MCAN3, /* Controller Instance */
(boolean)TRUE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_5 =
{
CanConf_CanController_CanController_5, /* Id as provided by GUI */
(boolean)TRUE, /* Contoller is used=1 or not_used=0*/
0x2748000U, /* Can Controller Base Address */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Rx Processing Type */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Tx Processing Type */
(boolean)TRUE,/* BusOff TRUE = Interrupt FALSE = Polling */
CAN_CONTROLLER_INSTANCE_MCAN4, /* Controller Instance */
(boolean)TRUE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_6 =
{
CanConf_CanController_CanController_6, /* Id as provided by GUI */
(boolean)TRUE, /* Contoller is used=1 or not_used=0*/
0x27b8000U, /* Can Controller Base Address */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Rx Processing Type */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Tx Processing Type */
(boolean)TRUE,/* BusOff TRUE = Interrupt FALSE = Polling */
CAN_CONTROLLER_INSTANCE_MCAN11, /* Controller Instance */
(boolean)TRUE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_7 =
{
CanConf_CanController_CanController_7, /* Id as provided by GUI */
(boolean)TRUE, /* Contoller is used=1 or not_used=0*/
0x27c8000U, /* Can Controller Base Address */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Rx Processing Type */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Tx Processing Type */
(boolean)TRUE,/* BusOff TRUE = Interrupt FALSE = Polling */
CAN_CONTROLLER_INSTANCE_MCAN12, /* Controller Instance */
(boolean)TRUE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_8 =
{
CanConf_CanController_CanController_8, /* Id as provided by GUI */
(boolean)TRUE, /* Contoller is used=1 or not_used=0*/
0x2688000U, /* Can Controller Base Address */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Rx Processing Type */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Tx Processing Type */
(boolean)TRUE,/* BusOff TRUE = Interrupt FALSE = Polling */
CAN_CONTROLLER_INSTANCE_MCAN14, /* Controller Instance */
(boolean)TRUE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_9 =
{
CanConf_CanController_CanController_9, /* Id as provided by GUI */
(boolean)TRUE, /* Contoller is used=1 or not_used=0*/
0x26a8000U, /* Can Controller Base Address */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Rx Processing Type */
CAN_TX_RX_PROCESSING_INTERRUPT, /* Can Tx Processing Type */
(boolean)TRUE,/* BusOff TRUE = Interrupt FALSE = Polling */
CAN_CONTROLLER_INSTANCE_MCAN16, /* Controller Instance */
(boolean)TRUE, /* CAN FD Mode Enable */
};
/*List of the Controller structures */
static Can_ControllerType
*CanConfigSet_CanController_List[]=
{
&CanConfigSet_CanController_0,
&CanConfigSet_CanController_1,
&CanConfigSet_CanController_2,
&CanConfigSet_CanController_3,
&CanConfigSet_CanController_4,
&CanConfigSet_CanController_5,
&CanConfigSet_CanController_6,
&CanConfigSet_CanController_7,
&CanConfigSet_CanController_8,
&CanConfigSet_CanController_9,
};
const struct Can_ControllerStruct_PC
*CanConfigSet_CanController_List_PC[CAN_NUM_CONTROLLER]=
{
&CanConfigSet_PC_CanController_0,
&CanConfigSet_PC_CanController_1,
&CanConfigSet_PC_CanController_2,
&CanConfigSet_PC_CanController_3,
&CanConfigSet_PC_CanController_4,
&CanConfigSet_PC_CanController_5,
&CanConfigSet_PC_CanController_6,
&CanConfigSet_PC_CanController_7,
&CanConfigSet_PC_CanController_8,
&CanConfigSet_PC_CanController_9,
};
/* HW Filter structure for all configsets */
/*List of the HW Filter structures */
/* All the Mailbox objects(MB's) will be defined here for all config sets */
static Can_MailboxType
CanConfigSet_CanHardwareObject_0 =
{
0U, /* CanHandleType 0=Full, 1=Basic */
0U, /* CanIdType 0=standard 1=Extended 2=Mixed*/
0U, /* HwHandle i.e Mailbox - Hw object in the controller */
1U, /* Length of the Mailbox */
CAN_MAILBOX_DIRECTION_TX, /* CanObjectType - Direction of Mailbox*/
&CanConfigSet_PC_CanController_0, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
204U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
static Can_MailboxType
CanConfigSet_CanHardwareObject_1 =
{
0U, /* CanHandleType 0=Full, 1=Basic */
0U, /* CanIdType 0=standard 1=Extended 2=Mixed*/
0U, /* HwHandle i.e Mailbox - Hw object in the controller */
1U, /* Length of the Mailbox */
CAN_MAILBOX_DIRECTION_TX, /* CanObjectType - Direction of Mailbox*/
&CanConfigSet_PC_CanController_1, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
204U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
static Can_MailboxType
CanConfigSet_CanHardwareObject_2 =
{
0U, /* CanHandleType 0=Full, 1=Basic */
0U, /* CanIdType 0=standard 1=Extended 2=Mixed*/
0U, /* HwHandle i.e Mailbox - Hw object in the controller */
1U, /* Length of the Mailbox */
CAN_MAILBOX_DIRECTION_TX, /* CanObjectType - Direction of Mailbox*/
&CanConfigSet_PC_CanController_2, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
204U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
static Can_MailboxType
CanConfigSet_CanHardwareObject_3 =
{
0U, /* CanHandleType 0=Full, 1=Basic */
0U, /* CanIdType 0=standard 1=Extended 2=Mixed*/
0U, /* HwHandle i.e Mailbox - Hw object in the controller */
1U, /* Length of the Mailbox */
CAN_MAILBOX_DIRECTION_TX, /* CanObjectType - Direction of Mailbox*/
&CanConfigSet_PC_CanController_3, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
204U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
static Can_MailboxType
CanConfigSet_CanHardwareObject_4 =
{
0U, /* CanHandleType 0=Full, 1=Basic */
0U, /* CanIdType 0=standard 1=Extended 2=Mixed*/
0U, /* HwHandle i.e Mailbox - Hw object in the controller */
1U, /* Length of the Mailbox */
CAN_MAILBOX_DIRECTION_TX, /* CanObjectType - Direction of Mailbox*/
&CanConfigSet_PC_CanController_4, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
204U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
static Can_MailboxType
CanConfigSet_CanHardwareObject_5 =
{
0U, /* CanHandleType 0=Full, 1=Basic */
0U, /* CanIdType 0=standard 1=Extended 2=Mixed*/
0U, /* HwHandle i.e Mailbox - Hw object in the controller */
1U, /* Length of the Mailbox */
CAN_MAILBOX_DIRECTION_TX, /* CanObjectType - Direction of Mailbox*/
&CanConfigSet_PC_CanController_5, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
204U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
static Can_MailboxType
CanConfigSet_CanHardwareObject_6 =
{
0U, /* CanHandleType 0=Full, 1=Basic */
0U, /* CanIdType 0=standard 1=Extended 2=Mixed*/
0U, /* HwHandle i.e Mailbox - Hw object in the controller */
1U, /* Length of the Mailbox */
CAN_MAILBOX_DIRECTION_TX, /* CanObjectType - Direction of Mailbox*/
&CanConfigSet_PC_CanController_6, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
204U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
static Can_MailboxType
CanConfigSet_CanHardwareObject_7 =
{
0U, /* CanHandleType 0=Full, 1=Basic */
0U, /* CanIdType 0=standard 1=Extended 2=Mixed*/
0U, /* HwHandle i.e Mailbox - Hw object in the controller */
1U, /* Length of the Mailbox */
CAN_MAILBOX_DIRECTION_TX, /* CanObjectType - Direction of Mailbox*/
&CanConfigSet_PC_CanController_7, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
204U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
static Can_MailboxType
CanConfigSet_CanHardwareObject_8 =
{
0U, /* CanHandleType 0=Full, 1=Basic */
0U, /* CanIdType 0=standard 1=Extended 2=Mixed*/
0U, /* HwHandle i.e Mailbox - Hw object in the controller */
1U, /* Length of the Mailbox */
CAN_MAILBOX_DIRECTION_TX, /* CanObjectType - Direction of Mailbox*/
&CanConfigSet_PC_CanController_8, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
204U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
static Can_MailboxType
CanConfigSet_CanHardwareObject_9 =
{
0U, /* CanHandleType 0=Full, 1=Basic */
0U, /* CanIdType 0=standard 1=Extended 2=Mixed*/
0U, /* HwHandle i.e Mailbox - Hw object in the controller */
1U, /* Length of the Mailbox */
CAN_MAILBOX_DIRECTION_TX, /* CanObjectType - Direction of Mailbox*/
&CanConfigSet_PC_CanController_9, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
204U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
/* All the Mailbox objects(MB's) will be defined here for all config sets */
static const struct Can_MailboxStruct_PC
CanConfigSet_PC_CanHardwareObject_0 =
{
CanConf_CanHardwareObject_CanHardwareObject_0, /* CanObjectId - Holds handle Id */
};
static const struct Can_MailboxStruct_PC
CanConfigSet_PC_CanHardwareObject_1 =
{
CanConf_CanHardwareObject_CanHardwareObject_1, /* CanObjectId - Holds handle Id */
};
static const struct Can_MailboxStruct_PC
CanConfigSet_PC_CanHardwareObject_2 =
{
CanConf_CanHardwareObject_CanHardwareObject_2, /* CanObjectId - Holds handle Id */
};
static const struct Can_MailboxStruct_PC
CanConfigSet_PC_CanHardwareObject_3 =
{
CanConf_CanHardwareObject_CanHardwareObject_3, /* CanObjectId - Holds handle Id */
};
static const struct Can_MailboxStruct_PC
CanConfigSet_PC_CanHardwareObject_4 =
{
CanConf_CanHardwareObject_CanHardwareObject_4, /* CanObjectId - Holds handle Id */
};
static const struct Can_MailboxStruct_PC
CanConfigSet_PC_CanHardwareObject_5 =
{
CanConf_CanHardwareObject_CanHardwareObject_5, /* CanObjectId - Holds handle Id */
};
static const struct Can_MailboxStruct_PC
CanConfigSet_PC_CanHardwareObject_6 =
{
CanConf_CanHardwareObject_CanHardwareObject_6, /* CanObjectId - Holds handle Id */
};
static const struct Can_MailboxStruct_PC
CanConfigSet_PC_CanHardwareObject_7 =
{
CanConf_CanHardwareObject_CanHardwareObject_7, /* CanObjectId - Holds handle Id */
};
static const struct Can_MailboxStruct_PC
CanConfigSet_PC_CanHardwareObject_8 =
{
CanConf_CanHardwareObject_CanHardwareObject_8, /* CanObjectId - Holds handle Id */
};
static const struct Can_MailboxStruct_PC
CanConfigSet_PC_CanHardwareObject_9 =
{
CanConf_CanHardwareObject_CanHardwareObject_9, /* CanObjectId - Holds handle Id */
};
/* List of the Mailboxes */
static Can_MailboxType
*CanConfigSet_CanHardwareObject_List[] =
{
&CanConfigSet_CanHardwareObject_0,
&CanConfigSet_CanHardwareObject_1,
&CanConfigSet_CanHardwareObject_2,
&CanConfigSet_CanHardwareObject_3,
&CanConfigSet_CanHardwareObject_4,
&CanConfigSet_CanHardwareObject_5,
&CanConfigSet_CanHardwareObject_6,
&CanConfigSet_CanHardwareObject_7,
&CanConfigSet_CanHardwareObject_8,
&CanConfigSet_CanHardwareObject_9,
};
/* List of the Mailboxes */
const struct Can_MailboxStruct_PC
*CanConfigSet_CanHardwareObject_List_PC[CAN_NUM_MAILBOXES] =
{
&CanConfigSet_PC_CanHardwareObject_0,
&CanConfigSet_PC_CanHardwareObject_1,
&CanConfigSet_PC_CanHardwareObject_2,
&CanConfigSet_PC_CanHardwareObject_3,
&CanConfigSet_PC_CanHardwareObject_4,
&CanConfigSet_PC_CanHardwareObject_5,
&CanConfigSet_PC_CanHardwareObject_6,
&CanConfigSet_PC_CanHardwareObject_7,
&CanConfigSet_PC_CanHardwareObject_8,
&CanConfigSet_PC_CanHardwareObject_9,
};
/*Can Config struct */
const struct Can_ConfigType_s CanConfigSet =
{
CanConfigSet_CanController_List, /* Controller List Pointer */
(10U), /* max Controllers */
CanConfigSet_CanHardwareObject_List, /* Mailbox List Pointer */
(10U),/* total number of mail boxes in this configset */
.MaxBaudConfigID =
{
[0] = 0U,
[1] = 0U,
[2] = 0U,
[3] = 0U,
[4] = 0U,
[5] = 0U,
[6] = 0U,
[7] = 0U,
[8] = 0U,
[9] = 0U
}, /* Baud rate structure id */
NULL_PTR, /* Reserved Param used for future use */
};
extern CONST(uint32, CAN_CONST)
Can_MsgmemRAMBaseAddr[CAN_MAX_CONTROLLER] =
{
0x40500000U, /* MCU MCAN0 */
0x40540000U, /* MCU MCAN1 */
0x2708000U, /* Main MCAN0 */
0x2718000U, /* Main MCAN1 */
0x2728000U, /* Main MCAN2 */
0x2738000U, /* Main MCAN3 */
0x2748000U, /* Main MCAN4 */
0x2758000U, /* Main MCAN5 */
0x2768000U, /* Main MCAN6 */
0x2778000U, /* Main MCAN7 */
0x2788000U, /* Main MCAN8 */
0x2798000U, /* Main MCAN9 */
0x27a8000U, /* Main MCAN10 */
0x27b8000U, /* Main MCAN11 */
0x27c8000U, /* Main MCAN12 */
0x27d8000U, /* Main MCAN13 */
0x2688000U, /* Main MCAN14 */
0x2698000U, /* Main MCAN15 */
0x26a8000U, /* Main MCAN16 */
0x26b8000U, /* Main MCAN17 */
};
extern CONST(uint32, CAN_CONST)
Can_MCANSSBaseAddr[CAN_MAX_CONTROLLER] =
{
0x40520000U, /* MCU_MCAN0_SS */
0x40560000U, /* MCU_MCAN1_SS*/
0x2700000U, /* MCAN0_SS */
0x2710000U, /* MCAN1_SS*/
0x2720000U, /* MCAN2_SS */
0x2730000U, /* MCAN3_SS */
0x2740000U, /* MCAN4_SS */
0x2750000U, /* MCAN5_SS */
0x2760000U, /* MCAN6_SS */
0x2770000U, /* MCAN7_SS */
0x2780000U, /* MCAN8_SS*/
0x2790000U, /* MCAN9_SS*/
0x27a0000U, /* MCAN10_SS */
0x27b0000U, /* MCAN11_SS */
0x27c0000U, /* MCAN12_SS*/
0x27d0000U, /* MCAN13_SS */
0x2680000U, /* MCAN14_SS */
0x2690000U, /* MCAN15_SS */
0x26a0000U, /* MCAN16_SS */
0x26b0000U, /* MCAN17_SS */
};
extern CONST(uint32, CAN_CONST)
Can_MCANCoreRegBaseAddr[CAN_MAX_CONTROLLER] =
{
0x40528000U, /* MCU_MCAN0_CFG */
0x40568000U, /* MCU_MCAN1_CFG*/
0x2701000U, /* MCAN0_CFG */
0x2711000U, /* MCAN1_CFG*/
0x2721000U, /* MCAN2_CFG */
0x2731000U, /* MCAN3_CFG */
0x2741000U, /* MCAN4_CFG */
0x2751000U, /* MCAN5_CFG */
0x2761000U, /* MCAN6_CFG */
0x2771000U, /* MCAN7_CFG */
0x2781000U, /* MCAN8_CFG*/
0x2791000U, /* MCAN9_CFG*/
0x27a1000U, /* MCAN10_CFG */
0x27b1000U, /* MCAN11_CFG */
0x27c1000U, /* MCAN12_CFG*/
0x27d1000U, /* MCAN13_CFG */
0x2681000U, /* MCAN14_SS */
0x2691000U, /* MCAN15_SS */
0x26a1000U, /* MCAN16_SS */
0x26b1000U, /* MCAN17_SS */
};
extern CONST(uint32, CAN_CONST)
Can_MCANECCAggrRegBaseAddr[CAN_MAX_CONTROLLER] =
{
0x40700000U, /* MCU_MCAN0_ECC_AGGR */
0x40701000U, /* MCU_MCAN1_ECC_AGGR*/
0x2A78000U, /* MCAN0_ECC_AGGR */
0x2A79000U, /* MCAN1_ECC_AGGR */
0x2A7A000U, /* MCAN2_ECC_AGGR*/
0x2A7B000U, /* MCAN3_ECC_AGGR */
0x2A7C000U, /* MCAN4_ECC_AGGR */
0x2A7D000U, /* MCAN5_ECC_AGGR */
0x2A7E000U, /* MCAN6_ECC_AGGR */
0x2A7F000U, /* MCAN7_ECC_AGGR */
0x2A40000U, /* MCAN8_ECC_AGGR */
0x2A41000U, /* MCAN9_ECC_AGGR*/
0x2A42000U, /* MCAN10_ECC_AGGR*/
0x2A43000U, /* MCAN11_ECC_AGGR */
0x2A44000U, /* MCAN12_ECC_AGGR */
0x2A45000U, /* MCAN13_ECC_AGGR*/
0x2A46000U, /* MCAN14_ECC_AGGR */
0x2A47000U, /* MCAN15_ECC_AGGR */
0x2A48000U, /* MCAN16_ECC_AGGR */
0x2A49000U, /* MCAN17_ECC_AGGR */
};
#define CAN_STOP_SEC_CONFIG_DATA
#include "Can_MemMap.h"
/* ========================================================================== */
/* Function Definitions */
/* ========================================================================== */
#define CAN_START_SEC_ISR_CODE
#include "Can_MemMap.h"
/** \brief MCU_MCAN0 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_0_Int0ISR(void)
{
Can_IntISR_Function(CAN_CONTROLLER_INSTANCE_MCU_MCAN0, 0x40500000U);
}
/** \brief MCAN1 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_3_Int0ISR(void)
{
Can_IntISR_Function(CAN_CONTROLLER_INSTANCE_MCAN1, 0x2718000U);
}
/** \brief MCU_MCAN1 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_1_Int0ISR(void)
{
Can_IntISR_Function(CAN_CONTROLLER_INSTANCE_MCU_MCAN1,0x40540000U);
}
/** \brief MCAN10 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_12_Int0ISR(void)
{
Can_IntISR_Function(CAN_CONTROLLER_INSTANCE_MCAN10, 0x27a8000U);
}
/** \brief MCAN3 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_5_Int0ISR(void)
{
Can_IntISR_Function(CAN_CONTROLLER_INSTANCE_MCAN3, 0x2738000U);
}
/** \brief MCAN4 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_6_Int0ISR(void)
{
Can_IntISR_Function(CAN_CONTROLLER_INSTANCE_MCAN4, 0x2748000U);
}
/** \brief MCAN11 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_13_Int0ISR(void)
{
Can_IntISR_Function(CAN_CONTROLLER_INSTANCE_MCAN11, 0x27b8000U);
}
/** \brief MCAN12 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_14_Int0ISR(void)
{
Can_IntISR_Function(CAN_CONTROLLER_INSTANCE_MCAN12, 0x27c8000U);
}
/** \brief MCAN14 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_16_Int0ISR(void)
{
Can_IntISR_Function(CAN_CONTROLLER_INSTANCE_MCAN14, 0x2688000U);
}
/** \brief MCAN16 Controller Instance ISR */
FUNC(void, CAN_CODE) Can_18_Int0ISR(void)
{
Can_IntISR_Function(CAN_CONTROLLER_INSTANCE_MCAN16, 0x26a8000U);
}
#define CAN_STOP_SEC_ISR_CODE
#include "Can_MemMap.h"
/*******************************************************************************
* End of File: Can_Cfg.c
******************************************************************************/
3.关键信息(important informations)
CanApp_Priv.h:
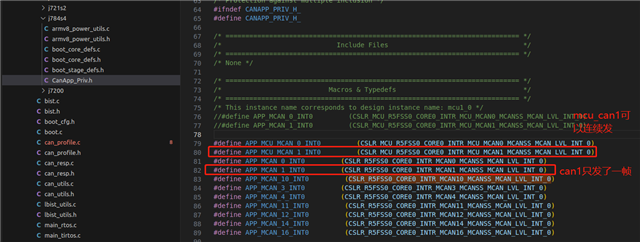
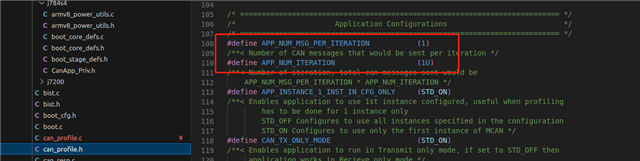
can_profile.h:
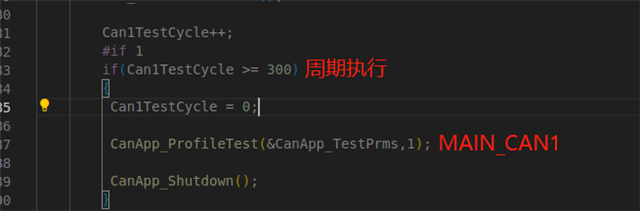
main_rtos.c:
结果根据日志显示(Log print as below):
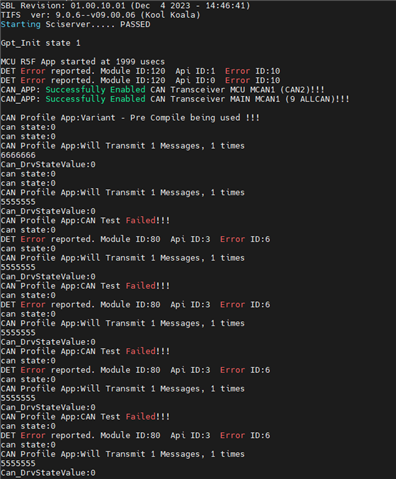
接CAN盒只收到一帧报文(only one message sent by main_can1 ,but mcu_can1 can send one message per 300ms )
