Other Parts Discussed in Thread: AWR1642, AWR1843, DCA1000EVM, IWR6843, MMWAVEICBOOST, IWR6843ISK, IWR6843LEVM, UNIFLASH
想要选择一款毫米波,用在户外机器人产品上做避障使用。有以下几个问题想咨询下。
1,选择24G还是77G还是60G?
2,欧美标准是否可以用24G和77G?(据说已经被汽车使用)
3,如果新手学习推荐使用哪款型号,资料相对比较全的?
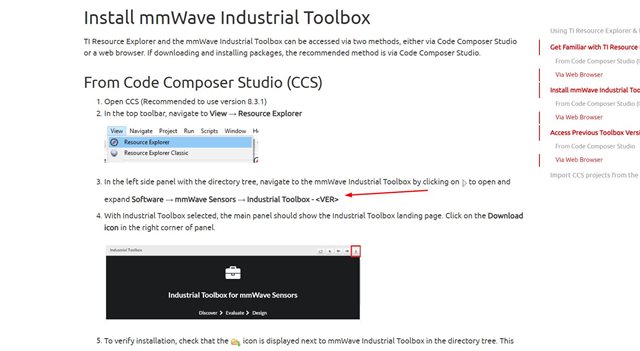
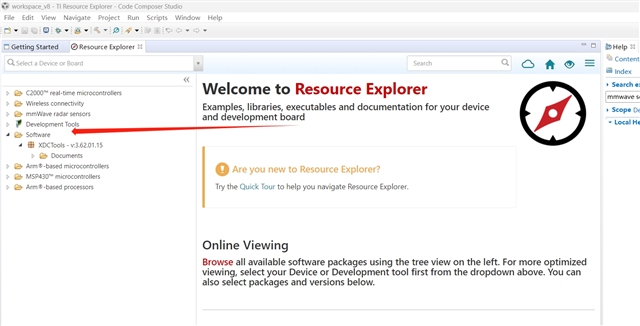
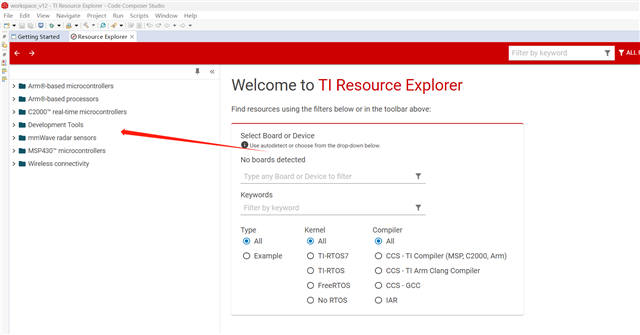
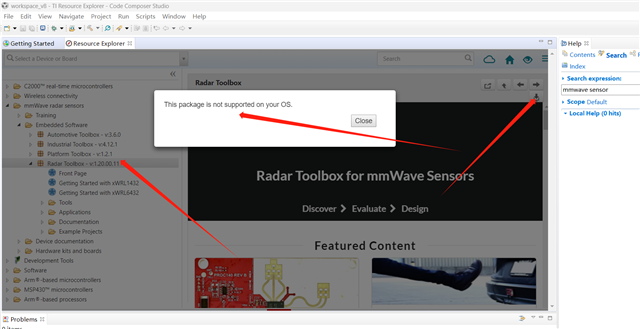
4,资料如何下载?
想要选择一款毫米波,用在户外机器人产品上做避障使用。有以下几个问题想咨询下。
1,选择24G还是77G还是60G?
2,欧美标准是否可以用24G和77G?(据说已经被汽车使用)
3,如果新手学习推荐使用哪款型号,资料相对比较全的?
4,资料如何下载?