

Other Parts Discussed in Thread: AWR2944
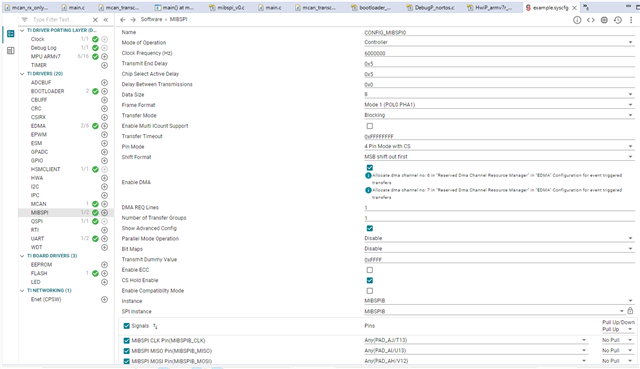
我在sbl中添加mcan通信代码,参照External Loopback Interrupt例程中的RX application,在example.syscfg配置了mcan和mibspi模块。在移植mcan_enableTransceiver()函数是出现了问题。
我想请问一下,通过mibspi去使能TCAN1042这段代码使用有特俗要求吗?必须要有freertos环境才行?在no-rtos的环境下是怎么使用的?谢谢。

