


Other Parts Discussed in Thread: IWR1443
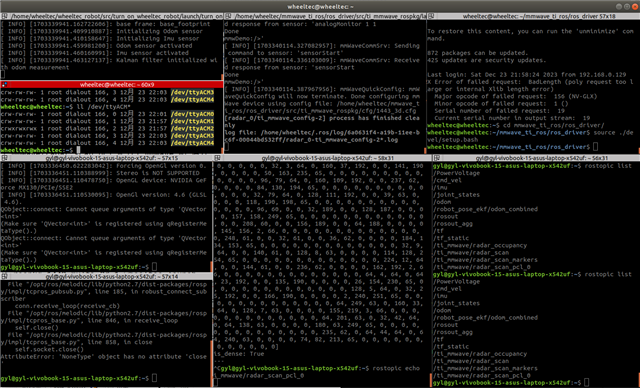
您好,我们有两块同样的IWR1443毫米波雷达,现在想要同时启动两块雷达,我们启动的文件是1443_multi_3d_0.launch和1443_multi_3d_1.launch。1443_multi_3d_0.launch中的端口是/dev/ttyACM0、/dev/ttyACM1,1443_multi_3d_1.launch中的端口是/dev/ttyACM2、/dev/ttyACM3。在两块雷达启动前,我们已经给了这四个端口的权限,但是当我们分别启动这两个文件时,两块毫米波雷达都没有点云数据,或者随机有一块雷达有数据,另一块雷达没有任何反应。
我们使用的是mmwave_ti_ros包,代码没有重新修改编译过。
但是当我们单独启动这两块,它们单独又是可以工作的,这应该可以说明不是这两块雷达本身的问题。以下是单独启动一块雷达时的话题显示:
下面这张图是我们启动两块雷达后的话题显示:(和单独一块雷达工作时,多了一个话题 /ti_mmwave/radar_scan_pcl_1)
我们目前怀疑是两块雷达使用接口的问题,我们目前有以下几个疑问不知道是不是和问题相关:
1、两块雷达的启动是否有固定顺序?先启动端口/dev/ttyACM0和/dev/ttyACM1,再启动/dev/ttyACM2和/dev/ttyACM3?
2、哪块雷达使用端口/dev/ttyACM0和/dev/ttyACM1,哪块雷达使用端口/dev/ttyACM2和/dev/ttyACM3?这是由什么决定的?因为我们发现根据两块雷达的启动顺序不同,它们使用的端口号也会随之发生改变?
3、源码有哪里需要修改吗?因为我们使用的代码和启动一块雷达的代码一模一样,除了用/dev/ttyACM2和/dev/ttyACM3代替/dev/ttyACM0和/dev/ttyACM1,其他部分没有进行任何修改,所以想问下当我们使用两块雷达时,源码中是否有哪里需要进行修改后重新编译的?比如说获取点云后的话题名称?我们现在不确定两块雷达在源码中是否用的同一个话题名称,这又是否会对两块雷达的数据获取造成影响
如果您有任何需要我们补充的信息我们会及时补充。期盼您的回复。



