

在做CC1310数据收发测试,当然,两块cc1310通信是没问题的,但想要兼容我们其他的发射模块,于是用的一个CC1310和我们的另一个射频模块做通信测试:
1. CC1310发,另一款RF收,结果:
a. 当发送的数据内容为01 02 03 04...这样不相同的数据时候,能正常的收到“前导码+同步字+数据内容”
b. 当发送的数据内容为 00 00 00 00 00...这样全为00的数据时候,收到的数据就比较乱,与“前导码+同步字+数据内容”的帧格式无法对应;
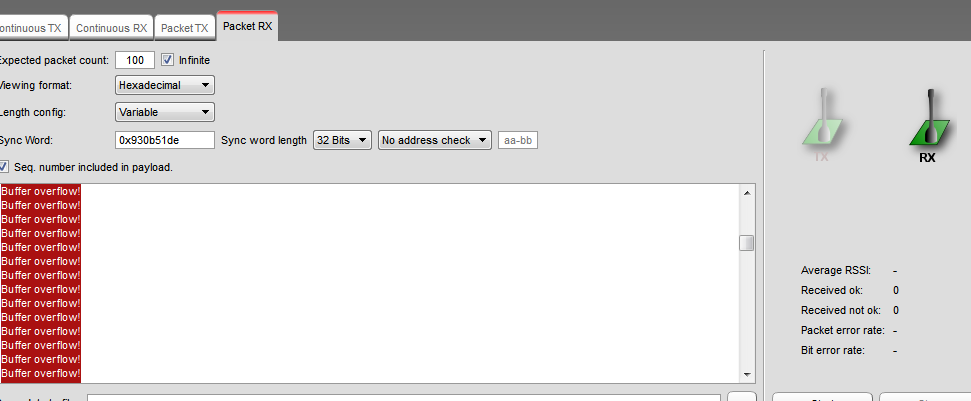
2. CC1310收,另一款RF来发射,由于这款RF的前导码与cc1310不同,于是我将发送包模拟为CC1310的帧格式,即实际发送的为“另一款RF的特定帧头+ cc1310 的(前导码+同步字) + 数据内容” 理论上CC1310能够接收发送帧然后剥离前导码同步字获得数据内容, 但是实际却是半天收不到,过了一会儿smartRF Studio接收窗口出现"Buffer over flow!" 这是咋回事???
3. CC1310的前导码只能是“0101” “1010” 为啥不能像cc1125一样支持4种前导码模式呢?? 以后能不能增加“0110” “1100"这两种模式的???



