

当前,我们日常生活中,代驾这个词使用越来越频繁,除了真人司机代驾,汽车本身也越来越智能,越来越成为司机的得力副驾驶。开发一个能够帮助汽车感知、理解周围世界并对其作出快速反应的动态系统,汽车自身可以成为司机的得力代驾。这样一个系统需要数据以及结合计算机视觉和高效深度学习神经网络实时处理数据的能力。今天我们介绍的双TDA4VM Navigate on Autopilot (NOA)行泊一体化方案,就是这样的一个系统。
NOA领航辅助驾驶实现了在高频场景的代驾, 比如城市环线、快速路、高速公路上的点对点的自动驾驶。NOA在全面升级辅助驾驶ADAS功能体验的同时,增加了自动并线、自动超车、自动上下匝道、自动路网切换等,推动了人机共驾的到来的同时,给用户带来了非凡的驾乘体验。
当前的汽车智能化的进程中,更多的汽车配备了强大的 ADAS 功能,在以场景为核心的自动驾驶技术向无人驾驶阶段过渡的过程中,NOA领航辅助驾驶是从高级驾驶辅助(ADAS)到全自动驾驶(FSD)之间的一个重要里程,NOA开启了一个人机共驾的时代,创造了在典型场景下沉浸式的驾驶体验。如何设计一个成本低廉、功能完整、灵活的硬件配置方案,是NOA大规模应用所面临的挑战。基于TI的双TDA4VM的NOA行泊一体化的方案平衡了算力、成本和能耗。下面跟大家具体介绍双TDA4VM NOA 行泊一体化解决方案该方案:

ADAS应用
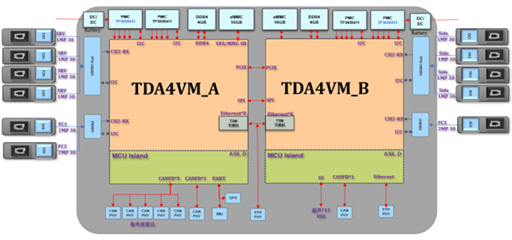
ADAS 解决方案需要从不同的传感器集中提取数据,并将数据转换为车辆的行驶情报。这些传感器至少需要配备不同类型的摄像头、雷达和超声波等;本文展示的方案采用了两颗 TDA4VM,接入了11个摄像头、5个毫米波雷达12个超声波雷达,既11V5R12USS行泊一体化解决方案。其系统框图如下图所示, TDA4VM_A 接入了四个全景摄像头和两个前向摄像头。TDA4VM_B接入了四个侧视摄像头和一个前向摄像头。
- 行车方面,可实现盲区检测(BSD)、开门预警(DOW)、车道偏离预警(LCW)、前向碰撞预警(FCW)、只能远光灯控制(IHC)、前方穿行预警(FCTA)、后方穿行预警(RCTA)、后方碰撞预警(RCW)、自适应巡航(ACC)、车道保持辅助(LKA)、手动变道(PLC)、交通拥堵辅助(TJA)、高速辅助驾驶(HWA)、自动紧急制动(AEB)、交互时高速公路自动驾驶(HWP)、交互式高速公路拥堵自动驾驶(TJP)、自动辅助导航驾驶(NOA)等功能;
- 泊车方面,可实现全景功能(AVM)、自动泊车辅助(APA)、遥控泊车辅助(RPA)、家庭区域记忆泊车(HAVP)等功能;
- 安全方面,TI Jacinto7 处理器有GP和HS(high security)芯片,内部集成了ASIL D的MCU,High security 的芯片可支持安全启动和安全关键功能,从而使用户的产品能够满足汽车的质量和可靠性目标。

TI安全框架
- 可扩展性,TDA4VM处理器属于异构多核的架构,除了ARM A72、数字信号处理C7x/C66、MCU R5F等计算核,内部VPAC、DMPAC等加速器有效降低了主核的负载,从而使得应用可以灵活部署,推动持续的功能定制、优化、扩展。
- 算力方面,本方案采用了双TDA4VM芯片,单芯片C7x/MMA可以实现8TOPS算力,总算力16TOPS算力,即可实现所介绍感知功能。TDA4VM_A芯片的AI算力主要用于全景摄像头、前向摄像头1、前向摄像头2的感知。TDA4VM_B芯片的算力AI主要应用于侧视摄像头和前向摄像头3的感知。
系统的开发必须具有较高性价比,才能实现广泛而有效的利用。采用双TDA4VM的NOA行泊一体的方案,平衡了算力、成本、和功耗,丰富的行车、泊车功能及高安全的系统,给用户带来了厘米级的控制精度,安全舒适的沉浸式的驾乘体验。

TI 最新一代Jacinto7 ADAS TDA4VM 处理器在芯片上集成了关键的功能安全特性,高性能片上系统 (SoC)的重要性在于它可以进行并行处理。 Jacinto7 TDA4处理器可以从简单的情况(更少的传感器,更低的分辨率)扩展到最复杂的情况,并有助于降低系统成本,从而实现 ADAS 技术大众化和普及化。双TDA4VM NOA行泊一体化方案是实现计算能力、成本和能耗平衡的完美答案。TDA4x以领先的集成度和丰富的ADAS功能引领汽车智能驾驶的新时代。
-

xingye zheng
-
取消
-
投赞成票
0
投反对票
-
-
登录以回复
-
更多
-
取消
评论-

xingye zheng
-
取消
-
投赞成票
0
投反对票
-
-
登录以回复
-
更多
-
取消
子级