

作者:Richard Wang
接近传感器及现有方案
接近感应传感器在我们的生活中发挥着重要的作用,在智能家居家电中广泛存在,如自动感应出水的水龙头,自动感应送风的空调,自动检测并避开障碍物的扫地机及自动打开与关闭的走廊灯等等。接近感应的主要技术手段目前主要有红外传感(包括主动红外和被动红外)、超声波传感、多普勒微波传感及红外光飞行时间(ToF)等。每一种技术手段都有其独特性及优缺点,下面我们将展开讨论。
主动红外因其成本低廉而应用广泛,其主要由一个红外发射管和一个红外接收管组成。红外发射管会发射一调制红外光信号,该信号在遇到障碍物后被反射回来,接收管通过接收该反射信号并判断反射信号的强度(即反射幅值)来判断障碍物的远近。然而,由于反射信号的强度不仅和障碍物距离有关系,还和障碍物的颜色有关,因为不同颜色的障碍物有不同的反射率,而且容易受到环境光的影响,故其可靠性比较低,无法输出一个准确的距离信息,只能通过调试设置一个粗略的触发门限 ,用于要求比较低的场合。
被动红外是基于热释电效应的一类传感器,由菲涅尔透镜和热释电传感器构成,其中菲涅尔透镜主要用来将被测区域内的人或者动物所发出的红外能量聚焦到感应窗口,感应窗口的滤光片会滤除特定波长(一般为人体发出的红外波长)之外的环境光。滤光片下面会有两个红外光敏感元,相向串接在电路中,在空闲状态时由于接收到相同量的环境红外光而相互抵消,故没有输出。当有人或者动物经过检测区域时,由于热释电效应其散发的红外能量首先被第一个敏感元检测到而产生一个正向的小信号输出,继而又被第二个敏感元检测到而产生一个负向的小信号输出,通过信号放大,传感器便可检测到附近人或者动物的活动。基于以上原理,我们不难看出,该类传感器可以感应检测范围内的人体或动物的移动,进而产生触发,静止的人体是无法检测的,而且在环境温度接近于人体温度的夏天,传感器可靠性会受到较大影响。传感器无法感知被测物体距离传感器的距离有多远。
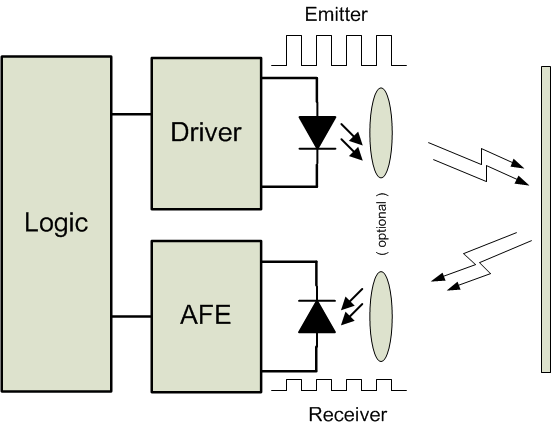 图1 主动红外
图1 主动红外
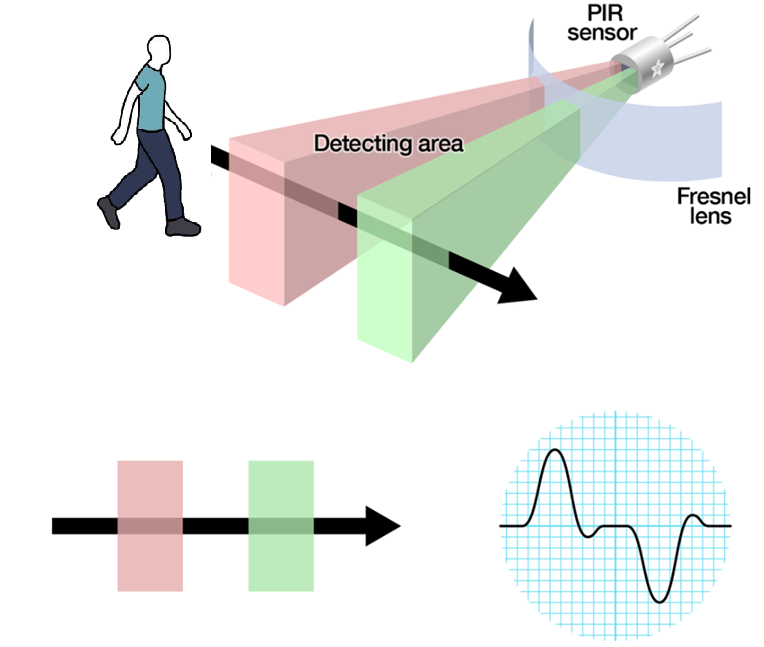 图2 被动红外原理
图2 被动红外原理
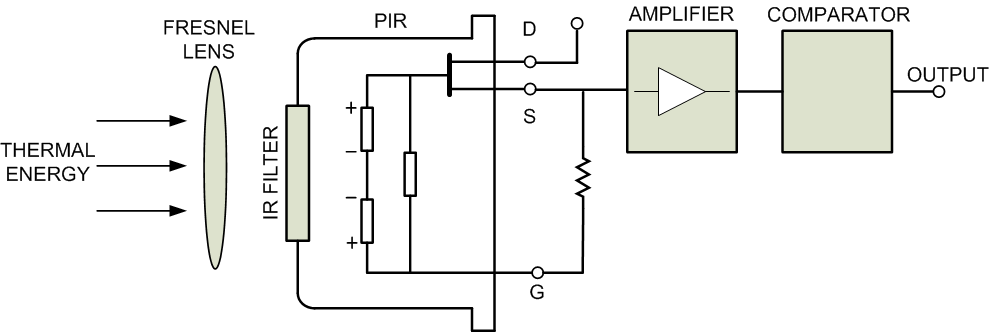
图3 被动红外传感器内部结构
多普勒微波传感器,顾名思义是基于多普勒效应工作的一类传感器,当被测对象相对于传感器运动时,根据多普勒效应,传感器发射的电磁波频率和接收到的由被测对象反射回来的电磁波频率不同,即产生频移,对该频移做信号调理便可产生一触发信号。该类低成本传感器和被动红外传感器一样只能检测目标的移动,而目标静止时无法检测到。
超声传感器是利用超声波作为载体的传感器,广泛用于各类测距及接近感应应用中,一般由一个超声发射器和一个超声接收器构成,发射器发射一个超声波脉冲出去,该脉冲遇到障碍物被反射回来被接收器接收,通过计算超声波的飞行时间乘以声波的速度,便可以得到障碍物的距离。常用的超声传感器可探测角度比较有限且体积较大,通常需要开音窗,不适合在工作环境较差的环境中使用。
基于光的飞行时间传感器是近年来发展起来的一种新型传感器,受到广泛关注,在很多领域得到了应用,那么这类传感器是如何工作的?其优点是什么?这就要从它的工作原理说起。
基于光飞行时间(Optical ToF)的接近传感器基本原理
ToF全称为Time of Flight, 即飞行时间,通常以红外光作为载体,通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测这些发射和接收光脉冲的飞行(往返)时间来得到目标物距离。光飞行时间的获取通常有两种方法,一种是基于光学快门法,一种是基于连续波相位差的方法。
基于光学快门的方法的原理非常简单,发射一束脉冲光波,通过光学快门快速精确获取照射到三维物体后反射回来的光波的时间差t,由于光速c已知,只要知道照射光和接收光的时间差,来回的距离可以通过公示d = t/2· c。 此种方法原理看起来非常简单,但是实际应用中要达到较高的精度仍具有很大的挑战,如控制光学快门开关的时钟要求非常高的精度,还要能够产生高精度及高重复性的超短脉冲,照射单元和TOF传感器都需要高速信号控制,这样才能达到高的深度测量精度。 假如照射光与ToF传感器之间的时钟信号发生10ps的偏移,就相当于1.5mm的位移误差。
实际应用更多的是相位偏移法。如图4所示,基于ToF技术的接近与距离传感器典型框图主要有两部分构成,红外光发射器和返回光接收器。发射器发射一连续高频调制光信号(如10MHz),该调制光遇到障碍物后被反射,少部分反射光被接收器接收。比较发射光信号与接收光信号如图5所示,其相位差随着距离的变化而变化,距离越大相位差越大,通过处理电路提取相位差并通过计算便可得出障碍物的距离信息。
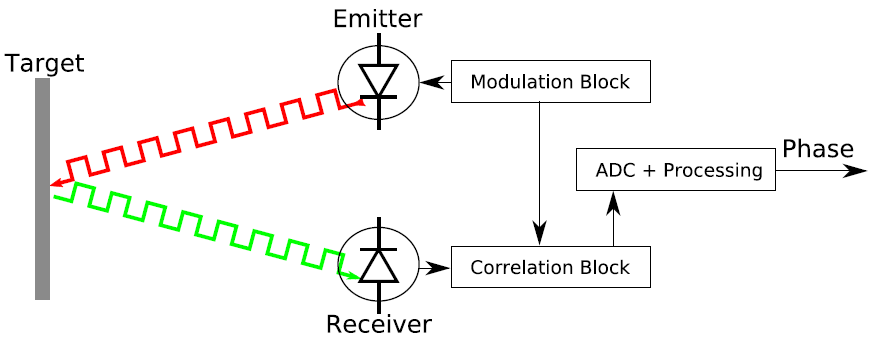
图4 单点ToF传感器框图
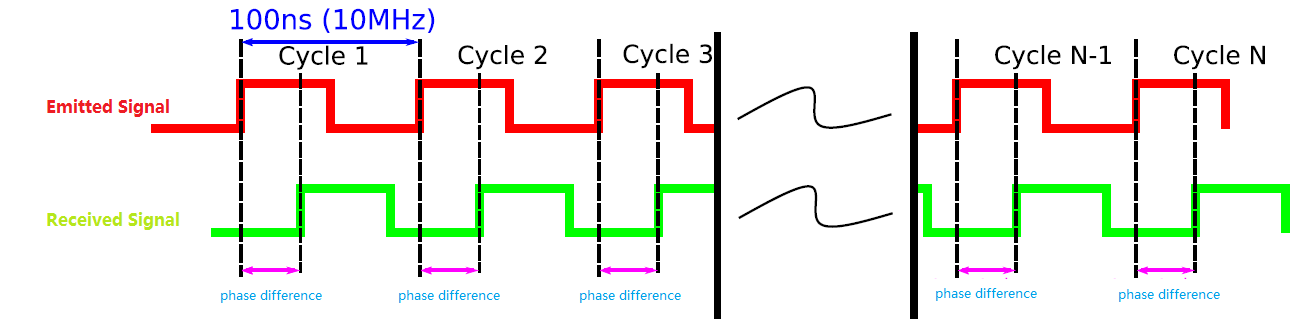
图5 发射光信号与返回光信号相位差
基于相位偏移法ToF技术的宽视角接近传感器
基于相位偏移法的ToF技术易于半导体技术集成与实现,可以使得接近传感器性能上大幅提升的同时兼具很高的性价比。实际应用中往往需要传感器具有宽视角,能够检测整个视角范围内的障碍物的距离信息,德州仪器的最新参考设计《具有抗日光功能的宽范围(120° FOV,1.6 米)接近传感参考设计》提供了一个能够输出准确距离信息的宽视角接近感应解决方案。该参考设计采用了德州仪器最新的单点ToF模拟前端芯片OPT3101。
OPT3101 是高速、高精度的单点 ToF 的模拟前端 AFE(算法基于连续调制波),用来接近感应和目标物 体的距离探测。如图6所示,芯片集成了完整的深度/距离处理单元--包含 ADC、时序发生器和数字处理 引擎,以及发射光二极管驱动电路(最大 155mA)。所以系统只需要连接外部的光源发射调制光信号,和 外部的光电二极管 Photodiode 接收发射光到芯片输入端。同时由于集成较高的环境光抑制能力,芯片能够 工作在较强的环境光条件下(如 130Klux),甚至 1000 倍于信号强度(如 200uA 环境光 vs 200nA 的信号 强度)。芯片输出数据中包含 16bit 的 Phase(景深/距离)数据、15bit 的接收反射光 Amplitude 强度数据 和 9bit 的环境光强度数据,通过 I2C 接口(Slave)输出。芯片另一个 I2C 接口(Master)是接外部温度 传感器(若需要,芯片本身已有集成了温度传感器),用来做温度校正功能。
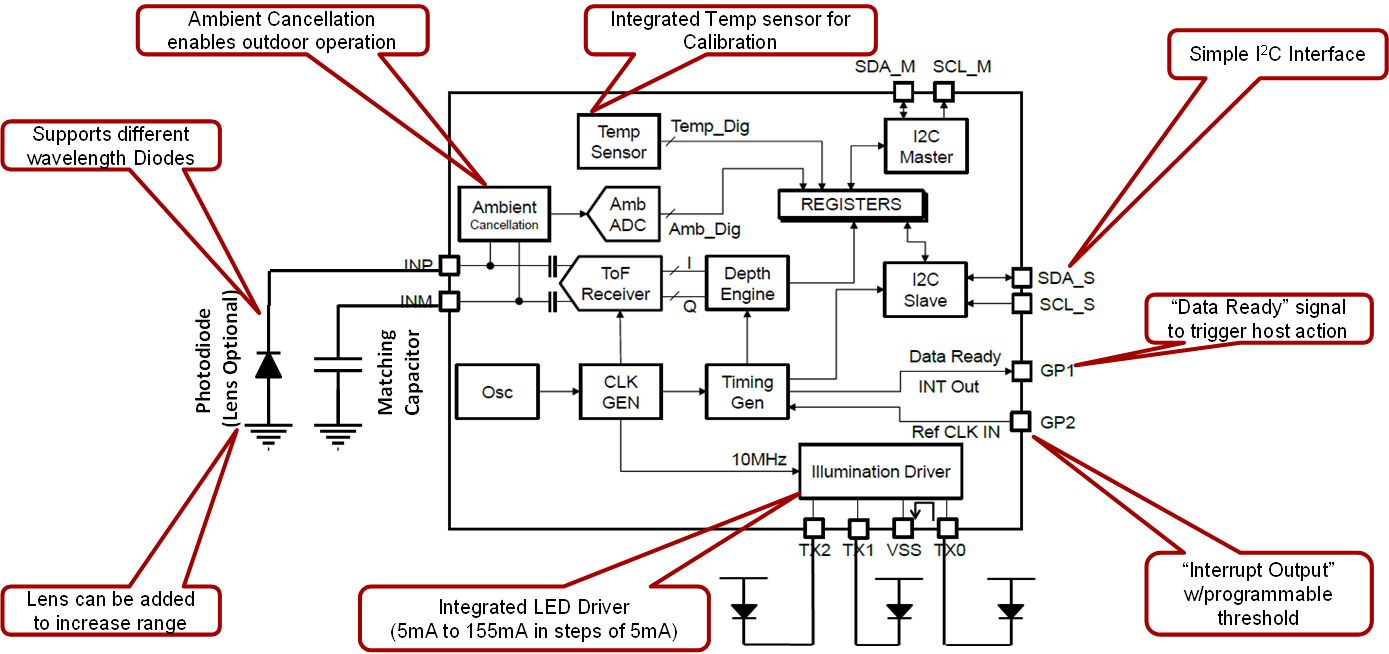
图6 OPT3101内部结构图
图7所示为设计原理框图,由于OPT3101的高集成度,传感器的外围器件非常简单,主要由三个红外发射管和一个红外接收管组成。MCU负责对OPT3101的内部寄存器进行配置及数据读取。设计可实现对120度可视角范围内的障碍物距离检测,其中,每个红外发射管负责40度范围,三个共计实现120度,如图8所示,红外接收管的可视角大于120度并且中心频率与发射管一致。
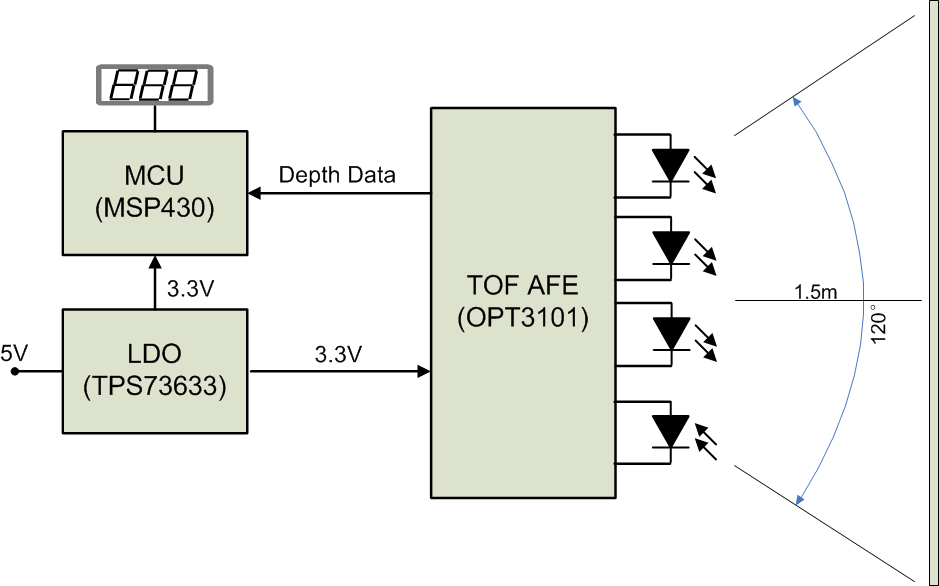 图7
图7
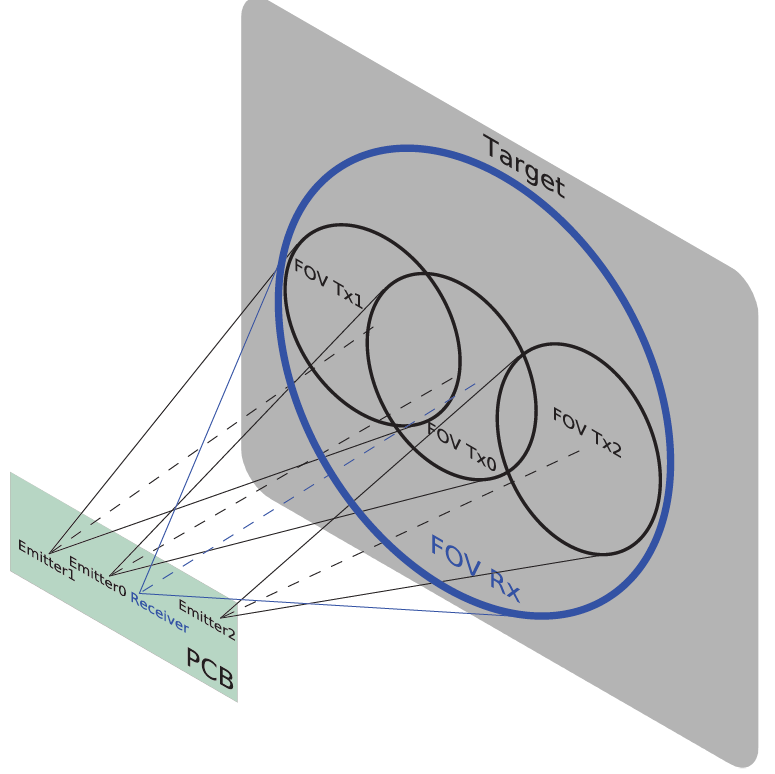 图8
图8
该传感器具有以下优点:
1、具有精确距离输出的接近传感器
直接距离输出,无需占用MCU计算资源
触发门限随意设定
不受物体是否移动影响
体积小巧灵活
2、120度宽视角
整个视角分为3个区域,由三颗发射灯分别覆盖
可识别物体处于哪个区域
3、不受物体颜色及反射率影响
高动态范围(HDR)
更高可靠性
4、更好的环境适应性
日光免疫,可在日光下可靠工作
黑暗环境下不受任何影响
Additional resources:
-
获取更多冰箱解决方案