
近年来,毫米波雷达技术愈益成熟。前面在工业领域,主要介绍了道闸雷达的应用;而在汽车领域,主要的雷达应用可以大致分为两大类:角雷达(Corner Radars)和前向雷达(Front Radars)。
角雷达(包括前向角雷达和后向角雷达)通常是短距离雷达,可满足盲区检测(BSD),变道辅助(LCA)和前后交通警报(F / RCTA)的要求;而前向雷达主要是用于自主紧急制动(AEB)和自适应巡航控制(ACC)的中远程雷达应用。
传统的角雷达主要是基于24GHz技术,但由于新兴的法规要求,并且需要更高的带宽,更小的尺寸以及更高的性能,角雷达正逐步向77 GHz频带转移。
本章节将会基于AWR1642介绍适用于角雷达的短程雷达解决方案。由于系统的框图跟之前的道闸雷达大同小异,主要的区别在于三点,一是雷达芯片使用的是AWR1642;二是接口芯片为汽车常用的CAN接口;三是为了让RF供电的电源轨更加干净,后面再用了一级LDO进行滤波之后再为车载的雷达芯片供电。
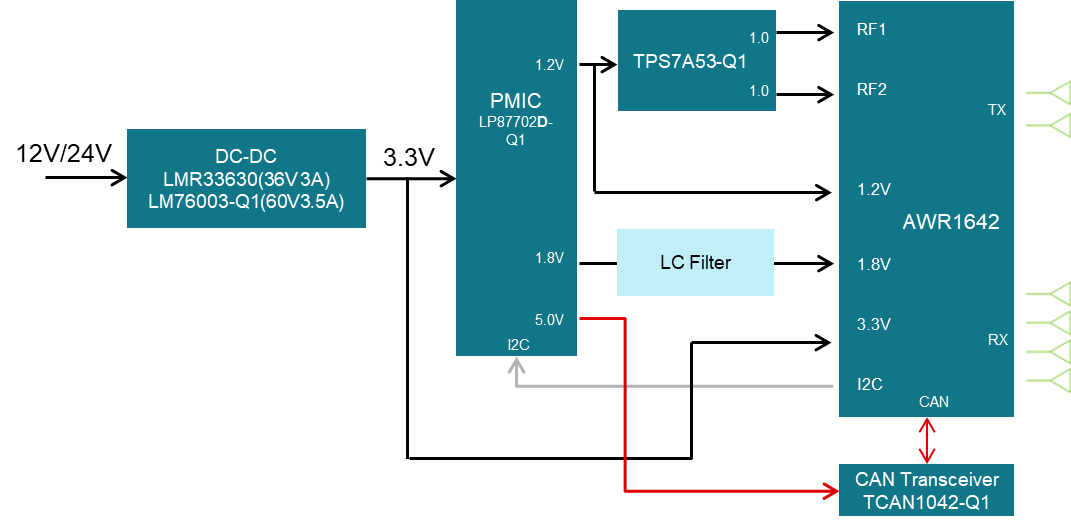
图- 1 角雷达应用的系统框图
下面将会围绕着AWR1642进行详细的展开。
AWR1642的高层次架构
AWR1642是高度集成的单芯片77 GHz毫米波雷达,其中包括两个发射端和四个接收端,一个600 MHz可编程的C674x DSP以及一个200 M Hz可编程的ARM Cortex-R4F处理器。该器件支持RF带宽,覆盖76-77 GHz和77-81 GHz频段。如图2所示,该器件包括四个主要模块:射频/模拟前端子系统,BIST子系统,DSP子系统和主控子系统。
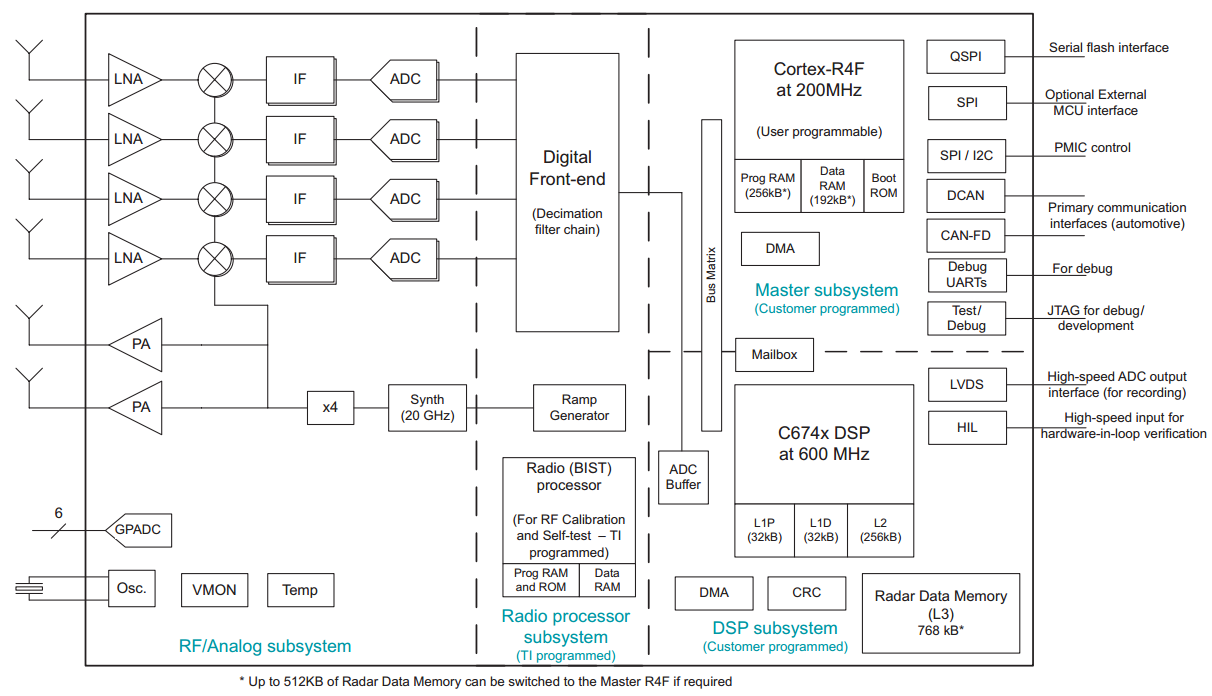
图- 2 AWR1642的高层次架构
- 射频/模拟前端子系统,包括射频和模拟电路:合成器,功率放大器(PAS),低噪声放大器(LNA),混频器,中频(IF)链路和模数转换器转换器(ADC)。该子系统还包括晶振,温度传感器、电压监视器和通用ADC。AWR1642器件使用一种复杂的基带架构,可以提供同相(I通道)和正交(Q通道)输出。
- 内建自测试子系统,又称为BIST子系统,包括数字前端,斜坡发生器和一个用于控制和配置低级射频模拟电路以及斜坡发生器的寄存器的内部处理器。(注意:该处理器是TI编程的,可以满足RF校准需求和BIST /监视功能,但它不能直接提供给用户使用。)数字前端负责滤波和抽取原始ADC输出,并以可编程的采样率提供最终的ADC数据采样。
- DSP子系统包括一个时钟频率为600 MHz的TI C674x DSP ,用于雷达信号处理,通常是处理原始的ADC数据。该DSP是用户可编程的,并且在使用时具有完全的灵活性。
- 主控子系统包括主频为200MHz的ARM的车规级Cortex-R4F处理器,这是用户可编程的。该处理器控制器件的整体操作,处理通信接口,并且实现更高层的算法,例如目标分类和追踪。该处理器还可以运行AUTOSAR系统。
AWR1642可用于短距离雷达(SRR)应用。该器件包括一个QSPI接口,可以直接从串行闪存下载用户代码;并且还包含了CAN-FD和CAN接口,因此可以与车辆CAN总线或专用CAN总线上的其他传感器直接通信;还可以使用SPI /I2C接口控制PMIC。
AWR1642 的可用总内存为1.5 MB。它支持在R4F program RAM,R4F data RAM,DSP L1和L2内存以及radar data 内存(L3内存)之间进行分区。表1列出了一些示例内存配置。
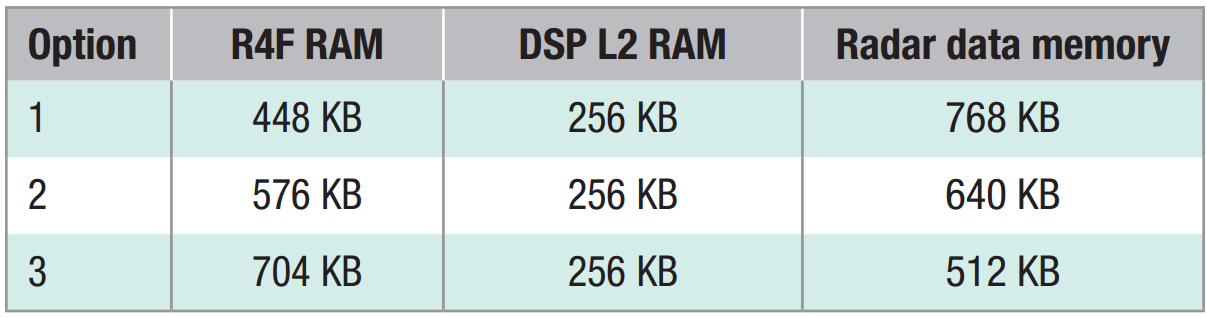
表- 1内存配置示例
- DSP子系统中的L2内存为256 KB,通常用于DSP应用的指令和即时数据。DSP子系统还包括32 KB的L1内存和data RAM,它们可以全部或部分配置为高速缓存。
- R4F具有448 KB的专用内存,该内存在R4F紧密耦合的内存接口TCMA (256 KB)和TCMB(192 KB)之间分配。尽管完整的448 KB内存没有设置并且可用于指令或数据,但典型的应用程序会将TCMA用作指令存储器,并将TCMB用作数据存储器。
- 剩余的768 KB是L3内存,可用作雷达数据立体内存。还能以128 KB的增量为R4F共享多达512 KB的L3内存。
DSP优势
AWR1642的关键优势之一是其内置的C674x DSP。调频连续波(FMCW)雷达技术在过去几年中取得了长足的发展。雷达在当前的车辆中扮演着更重要的角色,不仅是驾驶员的舒适度方面,还有安全方面。这些应用还使雷达在空间分辨率,速度分辨率以及目标检测和分类方面的性能要求更加严格。
AWR1642中完全可编程的DSP可以使客户能够实施专有算法并构建创新的解决方案,以解决雷达性能方面的难题。 围绕算法的研究不断进步,可以提高几个关键领域的性能,例如:
- 缓解干扰:随着越来越多的车辆采用雷达技术,雷达之间的干扰问题变得越来越严重。在这种情况下,用于检测和缓解干扰的创新算法是研究和信号处理算法开发的活跃领域。
- 改进检测算法:雷达的新兴应用,包括全自动驾驶的终极视野,因此需要与目标检测,地面杂波去除和最小化错误检测相关的改进算法,以确保稳定性。
- 高分辨率角度估计:与雷达相关的主要挑战之一是受限的角度分辨率。超越传统波束成形的几种先进的角度估计算法可以改善角度分辨率,其中包括通过旋转不变技术(ESPIRIT)进行信号分类(MUSIC)和信号参数估计。
- 聚类和目标分类算法:这是研究和算法开发的另一个活跃领域,尤其是需要使用高分辨率的雷达点云和使用微多普勒技术识别行人的目标分类算法。
为了满足这些需求,内置的DSP实现了高性能和完全可编程的信号处理能力。 表2提供了一些典型雷达信号处理例程中DSP性能的基准数据。
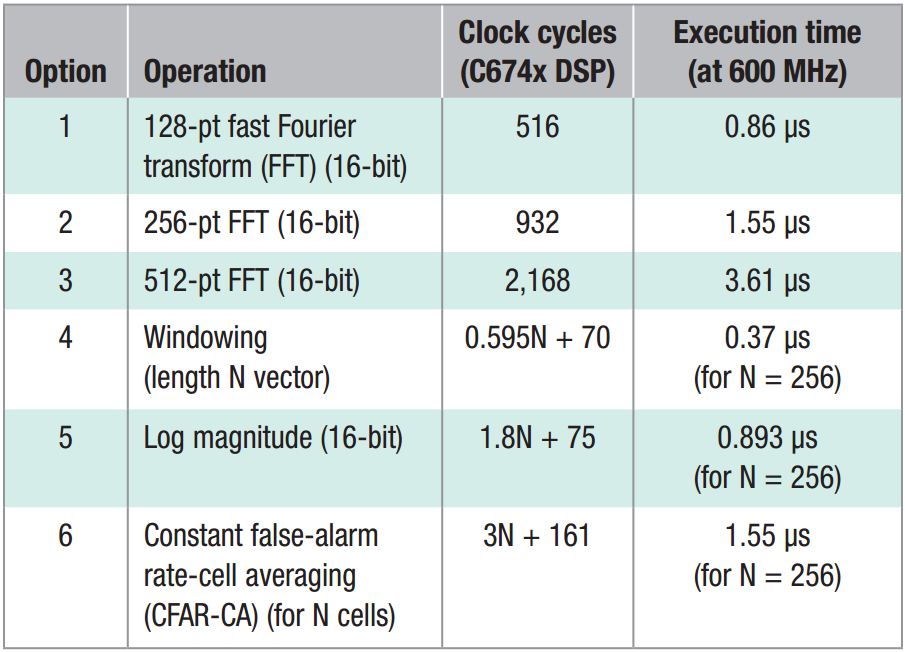
表- 2常见雷达信号处理例程的基准数据
加密安全
AWR1642 提供了安全的启动机制。安全启动是一种安全性使能程序,它提供了机制来帮助将代码算法保持在加密形式并帮助防止未经授权的访问。而且,它有助于避免将流氓代码植入到设备上,从而防止设备运行更改后的代码/功能。
为了加快计算量大的编码和解码过程,AWR1642配备了基于硬件的加速器安全功能,应用程序也可以使用这些功能来实现额外的安全性。
- 高级加密标准(AES)。
- 安全哈希加速器(SHA2)。
- 真随机数生成器(TRNG)。
- 公钥加速器(PKA)。
此外,AWR1642提供了一种安全的调试机制,使调试过程轻松自如,同时帮助保护器件免受各种威胁。
安全
AWR1642是TI SafeTI ™设计套件的一部分,可帮助开发人员在其应用中实现ISO26262 ASILB等级的功能安全。
AWR1642遵循一个称为“安全岛”的概念,该概念涉及硬件诊断的应用程序和软件诊断之间的平衡,以帮助管理功能安全。上电时它会全面测试一组核心元素,并对其进行密切监控,以帮助提供正确的软件执行。 此核心元素集包括电源、时钟、复位、R4F处理器、以及关联的程序和数据存储器,以帮助执行软件,从而在其他元素(例如外围设备)上能实现基于软件的诊断。
该器件还包括先进的内置电路,用于监控RF和模拟前端电路,运行TI固件的专用处理器(延迟锁定步骤)内核有助于简化应用程序开发,并且完全可以使DSP和MCU每秒从任何种类的雷达前端监控中获取百万条指令(MIPS)。
AWR1642传感器支持以下前端诊断功能:
- 合成器线性调频监视器。
- TX输出功率监视器。
- 基于射频环回的噪声系数,增益不平衡和相位不平衡监视器。
- RX饱和度监视器。
- 基于IF回送的IF放大器(IFA)抖动衰减监视器。
- Ball-break监控器。
- 温度传感器。
其他关键诊断功能包括用于中央处理器(CPU)内核的逻辑BIST,用于所有存储器的存储器BIST,用于每个处理器的窗口式看门狗,端到端纠错码,存储器保护单元,时钟和电源监视器,复位时的故障波动 ,以及错误信号发送模块。
这些功能有助于使开发人员更轻松,更快速地实现ASIL-B功能安全性。对安全至关重要的开发需要管理系统性故障和随机性故障。 TI为安全关键型半导体创建了独特的开发流程,定制了ISO 26262:2011的功能安全生命周期,以最有效地满足非安全环境(SEooC)的需求。 此开发过程已通过独立第三方审核员TÜVSÜD的认证。
AWR1642用例
AWR1642是用于短程汽车市场雷达应用的radar-on-chip。以一个多模式的使用示例为例,短距离雷达(SRR)的范围为80 m,超短距离雷达(USRR)的范围为20 m;配置可参考表3 。

*使用速度歧义度解析技术可以提高实际最大速度。
表- 3 多模SRR示例的线性调频配置示例
表3中的示例使用512 KB雷达数据立方体内存,并通过八个虚拟天线(两个TX,四个RX)实现了80 m的范围。其他变化也有可能实现不同的系统性能指标。
下图3描绘了在25 m和40 m处两点物体的模拟情况下,具有80 m线性调频配置的雷达图像。 图3的左侧描述了目标的范围和相对速度,而右侧则显示了目标的范围和相对速度。
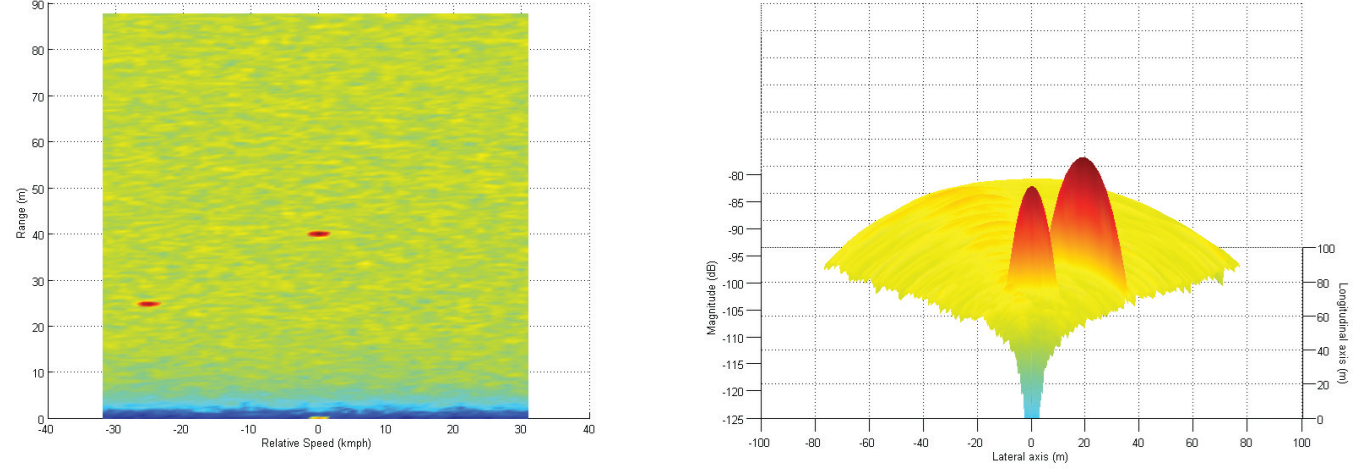
图- 3 两点目标模拟情况的雷达二维FFT图像
与24GHz相比,在BSD等应用中使用76–81GHz可以实现高范围分辨率(可能达到4 cm的分辨率)和更高的速度分辨率(这对于停车辅助应用很重要) ,而且还可以减小天线的外形尺寸,这是一个明显的优势。
R4F处理器具有704 KB的可用内存,可用于高层算法,例如群集和跟踪,以及控制和主机接口功能(包括AUTOSAR,这是独立传感器实现通常需要的)。开发人员还可以考虑在DSP中实现诸如群集和跟踪之类的更高层算法。
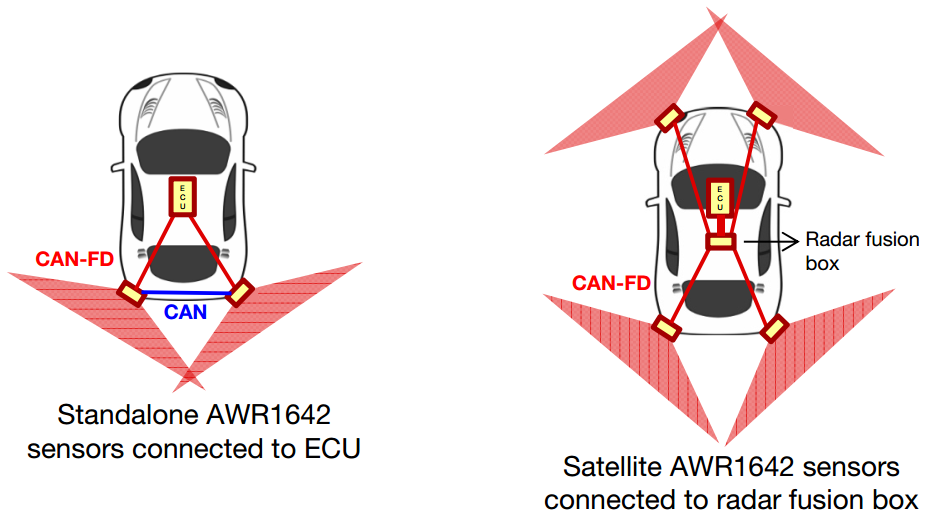
图- 4 使用AWR1642 mmWave传感器的角雷达系统拓扑
图4为将AWR1642安装在车辆四个角落的角雷达系统拓扑,并且将原始检测到的物体馈送到雷达融合盒子的情况。在这种拓扑结构中,四个角雷达执行1-D,2-D FFT,检测和角度估计处理,并通过CAN-FD接口将原始检测到的物体发送到中央雷达融合盒子。 第二个CAN接口的可用性还使传感器能够通过专用CAN总线同时与其他传感器通信。
综上所述, AWR1642 mmWave不仅便于研发人员设计,其优势也显而易见:
- 提供了76-81GHz的更宽的RF带宽,更高线性的chirps,更快的上升速度(高达100 MHz / µs)和片上BIST功能,便于安全监控。
- 通过集成DSP,AWR1642传感器使创新算法能够应对干扰和对物体进行强大检测的新挑战。
以上优势,使得AWR1642可以广泛应用于BSD盲区检测,为客户在兼顾高性价比的同时,也能提供高性能的解决方案。
-

shouyong sun
-
取消
-
投赞成票
0
投反对票
-
-
登录以回复
-
更多
-
取消
评论-

shouyong sun
-
取消
-
投赞成票
0
投反对票
-
-
登录以回复
-
更多
-
取消
子级