
作者:Hardy Zhou
在电机无感控制算法方面,TI提供了eSMO滑模观测器来计算电机转子角度. 在应用方面,TI提供了eSMO lib文件和相关文档说明eSMO的使用,但是在使用过程中,可能没法从相关文档上理解Fsmopos和Gsmopos的含义,不方便调试. 因此本篇主要推导 TI eSMO电流计算公式,并导出Fsmopos和Gsmopos(分别简称F和G)公式,同时我们可以从推导出的公式看到TI 的计算和其他F和G的计算方式的差别,加深理解和熟练应用.
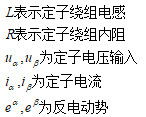
PMSM在静止α、β坐标系下的数学模型如下:
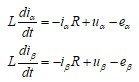 (1)
(1)
TI eSMO滑模观测器结构数学模型如下
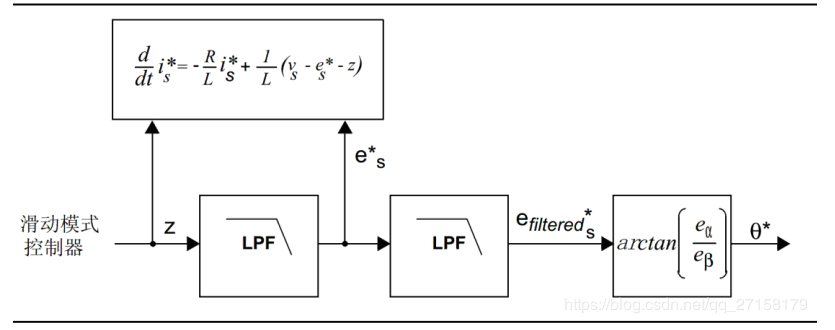
从结构上看,比较清晰明了,使用开关切换函数估算反电动势,从而求得电机转子角度.
从而我们可以得到以下的观测器表达式
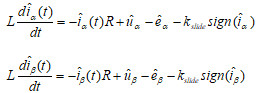
其中

基于以上公式,我们在α轴上求解eSMO电流,类似地可以求得β轴电流公式.

电流在时域下的解为:
对应离散时间Ts的电流解为
 (1)
(1)
从而得到:
 (2)
(2)
(2) – (1)得到
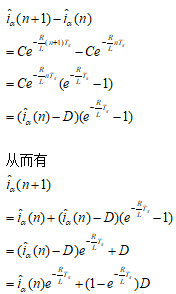
从而可以得到
注意: 如果离散时间Ts足够小,可以使用 近似.
近似.
那么就有

这样就跟其他非指数形式的表达式一样.
参考博客
https://blog.csdn.net/qq_27158179/article/details/83658950