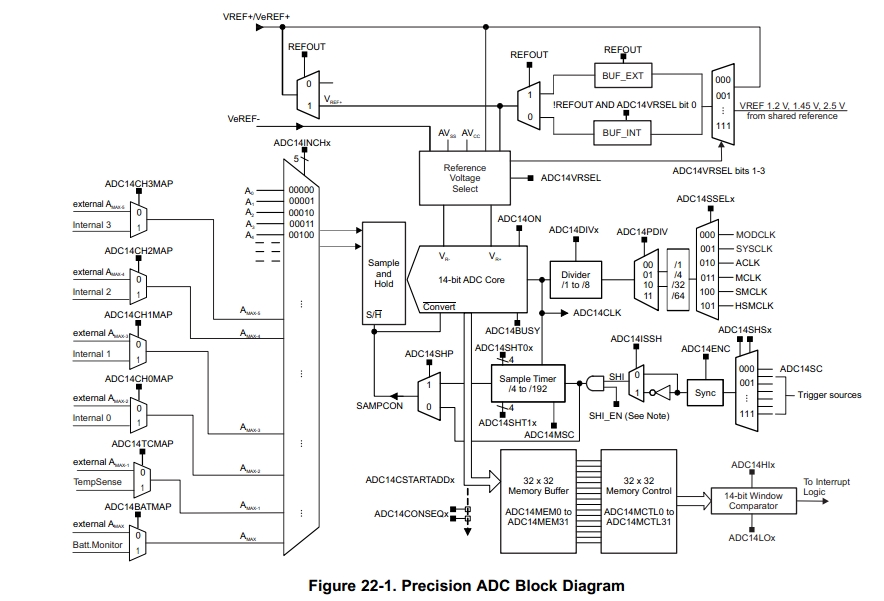
这几天尝试玩了一下MSP432P401R的ADC采样外设。MSP432P401R这款单片机的ADC是14位精度,通过软件过采样可以支持达到16位精度,高达1Msps采样速率。有单端和差分方式输入,2个窗口比较器,有32个采样通道,其中内部通道6个。有3个内部电压基准:1.2V,1.45V,2.5V。
下图是ADC框图:
正好自己有用模拟型加速度传感器MMA7361,以前项目做震动和倾斜检测用的。这次正好拿来测试一下MSP432P401R的ADC功能。MMA7361有XYZ轴模拟电压,需要3路AD采样。
硬件连接:
Z轴--->P5.5(A0)
Y轴--->P5.4(A1)
X轴--->P4.7(A6)
选择这3个引脚是因为板子上3个引脚正好在一起,方便连接。
配置ADC为3个通道连续循环转换,使用软件触发采样源,基准电压使用AVCC=3.3V。程序实现简单的倾斜和震动检测,当发生倾斜或者震动时点亮LED灯。可以调整感应灵敏度阈值。
//***************************************************************************** // // Copyright (C) 2014 Texas Instruments Incorporated - http://www.ti.com/ // // Redistribution and use in source and binary forms, with or without // modification, are permitted provided that the following conditions // are met: // // Redistributions of source code must retain the above copyright // notice, this list of conditions and the following disclaimer. // // Redistributions in binary form must reproduce the above copyright // notice, this list of conditions and the following disclaimer in the // documentation and/or other materials provided with the // distribution. // // Neither the name of Texas Instruments Incorporated nor the names of // its contributors may be used to endorse or promote products derived // from this software without specific prior written permission. // // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS // "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT // LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR // A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT // OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT // LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, // DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY // THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT // (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE // OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. // // main.c - MSP-EXP432P401R Out Of Box Demo // // Blinks RGB LED at 1Hz. Button S1 allows taps-to-beat that will // match the RGB blink frequency to the tap frequency. Button S2 // cycles through 4 different color states, R/G/B/RandomColor, each // with its saved blink frequency. // // The demo also accepts UART data from the Out Of Box GUI that // allows changing the RGB LED's color with a color wheel and // frequency by entering desired beats-per-minute // //**************************************************************************** #include <ti/devices/msp432p4xx/driverlib/driverlib.h> #include <time.h> #include <stdlib.h> #define MCLK_FREQUENCY 3000000 int sysTickCount = 0; // Counts # of SysTick interrupts since last tap /* UART Configuration Parameter. These are the configuration parameters to * make the eUSCI A UART module to operate with a 115200 baud rate. These * values were calculated using the online calculator that TI provides * at: *processors.wiki.ti.com/.../USCI_UART_Baud_Rate_Gen_Mode_Selection */ const eUSCI_UART_Config uartConfig = { EUSCI_A_UART_CLOCKSOURCE_SMCLK, // SMCLK Clock Source 26, // BRDIV = 26 0, // UCxBRF = 0 0, // UCxBRS = 0 EUSCI_A_UART_NO_PARITY, // No Parity EUSCI_A_UART_LSB_FIRST, // MSB First EUSCI_A_UART_ONE_STOP_BIT, // One stop bit EUSCI_A_UART_MODE, // UART mode EUSCI_A_UART_LOW_FREQUENCY_BAUDRATE_GENERATION // Low Frequency Mode }; /* Statics */ static volatile uint16_t curADCResult; static volatile float normalizedADCRes; uint8_t AdcValue[16]; uint32_t tickcnt; uint16_t ADC_x[5]; uint16_t ADC_y[5]; uint16_t ADC_z[5]; uint16_t ADC_x_cnt = 0; uint16_t ADC_y_cnt = 0; uint16_t ADC_z_cnt = 0; uint16_t ADC_x_cen = 0; //ˮƽֵ uint16_t ADC_y_cen = 0; //ˮƽֵ uint16_t ADC_z_cen = 0; //ˮƽֵ uint16_t ADC_x_cur = 0; //µ±Ç°Öµ uint16_t ADC_y_cur = 0; //µ±Ç°Öµ uint16_t ADC_z_cur = 0; //µ±Ç°Öµ uint16_t SortValue(uint16_t *buf, uint16_t len) { uint16_t i,j; uint16_t temp; if(len < 3) return 0; for(i=1; i<len; i++) { for(j = 0; j < (len-i); j++) { if(buf[j] > buf[j+1]) { temp = buf[j]; buf[j] = buf[j+1]; buf[j+1] = temp; } } } temp = 0; for(i=1;i<(len-1);i++) { temp += buf[i]; } temp /= (len-2); return temp; } /* * Main function */ int main(void) { /* Halting WDT and disabling master interrupts */ MAP_WDT_A_holdTimer(); MAP_Interrupt_disableMaster(); /* Initializing Variables */ curADCResult = 0; AdcValue[0] = 0xff; AdcValue[1] = 0xff; AdcValue[2] = 0; AdcValue[3] = 0; AdcValue[4] = 0; AdcValue[5] = 0; AdcValue[6] = 0; AdcValue[7] = 0; AdcValue[8] = 0; AdcValue[9] = 0; /* Set the core voltage level to VCORE1 */ MAP_PCM_setCoreVoltageLevel(PCM_VCORE1); /* Set 2 flash wait states for Flash bank 0 and 1*/ MAP_FlashCtl_setWaitState(FLASH_BANK0, 2); MAP_FlashCtl_setWaitState(FLASH_BANK1, 2); /* Initialize main clock to 3MHz */ MAP_CS_setDCOCenteredFrequency(CS_DCO_FREQUENCY_3); MAP_CS_initClockSignal(CS_MCLK, CS_DCOCLK_SELECT, CS_CLOCK_DIVIDER_1 ); MAP_CS_initClockSignal(CS_HSMCLK, CS_DCOCLK_SELECT, CS_CLOCK_DIVIDER_1 ); MAP_CS_initClockSignal(CS_SMCLK, CS_DCOCLK_SELECT, CS_CLOCK_DIVIDER_1 ); /* Confinguring P1.1 & P1.4 as an input and enabling interrupts */ MAP_GPIO_setAsInputPinWithPullUpResistor(GPIO_PORT_P1, GPIO_PIN1 | GPIO_PIN4); MAP_GPIO_clearInterruptFlag(GPIO_PORT_P1, GPIO_PIN1 | GPIO_PIN4); MAP_GPIO_enableInterrupt(GPIO_PORT_P1, GPIO_PIN1 | GPIO_PIN4); MAP_GPIO_interruptEdgeSelect(GPIO_PORT_P1, GPIO_PIN1 | GPIO_PIN4, GPIO_HIGH_TO_LOW_TRANSITION); /* Selecting P1.2 and P1.3 in UART mode */ MAP_GPIO_setAsPeripheralModuleFunctionInputPin(GPIO_PORT_P1, GPIO_PIN2 | GPIO_PIN3, GPIO_PRIMARY_MODULE_FUNCTION); /* Configuring UART Module */ MAP_UART_initModule(EUSCI_A0_BASE, &uartConfig); /* Enable UART module */ MAP_UART_enableModule(EUSCI_A0_BASE); //P1.0,P2.0,P2.1,P2.2 MAP_GPIO_setAsOutputPin(GPIO_PORT_P1, GPIO_PIN0); MAP_GPIO_setAsOutputPin(GPIO_PORT_P2, GPIO_PIN0 | GPIO_PIN1 | GPIO_PIN2); /* Enabling the FPU for floating point operation */ MAP_FPU_enableModule(); MAP_FPU_enableLazyStacking(); //![Single Sample Mode Configure] /* Initializing ADC (MCLK/1/1) */ MAP_ADC14_enableModule(); MAP_ADC14_initModule(ADC_CLOCKSOURCE_MCLK, ADC_PREDIVIDER_1, ADC_DIVIDER_4,0); /* Configuring GPIOs (5.5 A0)(5.4 A1) */ MAP_GPIO_setAsPeripheralModuleFunctionInputPin( GPIO_PORT_P5, GPIO_PIN4|GPIO_PIN5, GPIO_TERTIARY_MODULE_FUNCTION); //(4.7 A6) MAP_GPIO_setAsPeripheralModuleFunctionInputPin(GPIO_PORT_P4,GPIO_PIN7, GPIO_TERTIARY_MODULE_FUNCTION); /* Configuring ADC Memory */ MAP_ADC14_configureMultiSequenceMode(ADC_MEM0,ADC_MEM2, true); MAP_ADC14_configureConversionMemory(ADC_MEM0, ADC_VREFPOS_AVCC_VREFNEG_VSS, ADC_INPUT_A0, false); MAP_ADC14_configureConversionMemory(ADC_MEM1, ADC_VREFPOS_AVCC_VREFNEG_VSS, ADC_INPUT_A1, false); MAP_ADC14_configureConversionMemory(ADC_MEM2, ADC_VREFPOS_AVCC_VREFNEG_VSS, ADC_INPUT_A6, false); /* Configuring Sample Timer */ MAP_ADC14_enableSampleTimer(ADC_MANUAL_ITERATION); /* Enabling/Toggling Conversion */ MAP_ADC14_enableConversion(); //![Single Sample Mode Configure] /* Configure and enable SysTick 1ms*/ MAP_SysTick_setPeriod(1500); MAP_SysTick_enableModule(); MAP_SysTick_enableInterrupt(); /* Enabling interrupts */ MAP_GPIO_clearInterruptFlag(GPIO_PORT_P1, GPIO_PIN1 | GPIO_PIN4); MAP_UART_enableInterrupt(EUSCI_A0_BASE, EUSCI_A_UART_RECEIVE_INTERRUPT); MAP_ADC14_enableInterrupt(ADC_INT0 | ADC_INT1 | ADC_INT2); MAP_Interrupt_enableInterrupt(INT_EUSCIA0); MAP_Interrupt_enableInterrupt(INT_PORT1); MAP_Interrupt_enableInterrupt(INT_ADC14); MAP_Interrupt_enableMaster(); /* Main while loop */ MAP_ADC14_toggleConversionTrigger(); tickcnt = sysTickCount; while(1) { if((sysTickCount - tickcnt) > 10) { MAP_UART_transmitData(EUSCI_A0_BASE, AdcValue[0]); MAP_UART_transmitData(EUSCI_A0_BASE, AdcValue[1]); MAP_UART_transmitData(EUSCI_A0_BASE, AdcValue[2]); MAP_UART_transmitData(EUSCI_A0_BASE, AdcValue[3]); MAP_UART_transmitData(EUSCI_A0_BASE, AdcValue[4]); MAP_UART_transmitData(EUSCI_A0_BASE, AdcValue[5]); MAP_UART_transmitData(EUSCI_A0_BASE, AdcValue[6]); MAP_UART_transmitData(EUSCI_A0_BASE, AdcValue[7]); MAP_UART_transmitData(EUSCI_A0_BASE, AdcValue[8]); MAP_UART_transmitData(EUSCI_A0_BASE, AdcValue[9]); if((ADC_x_cur > (ADC_x_cen + 0x800)) || ((ADC_x_cur + 0x800) < (ADC_x_cen))) { MAP_GPIO_setOutputHighOnPin(GPIO_PORT_P2, GPIO_PIN0); }else { MAP_GPIO_setOutputLowOnPin(GPIO_PORT_P2, GPIO_PIN0); } if((ADC_y_cur > (ADC_y_cen + 0x800)) || ((ADC_y_cur + 0x800) < (ADC_y_cen))) { MAP_GPIO_setOutputHighOnPin(GPIO_PORT_P2, GPIO_PIN1); }else { MAP_GPIO_setOutputLowOnPin(GPIO_PORT_P2, GPIO_PIN1); } if((ADC_z_cur > (ADC_z_cen + 0x800)) || ((ADC_z_cur + 0x800) < (ADC_z_cen))) { MAP_GPIO_setOutputHighOnPin(GPIO_PORT_P2, GPIO_PIN2); }else { MAP_GPIO_setOutputLowOnPin(GPIO_PORT_P2, GPIO_PIN2); } MAP_GPIO_setOutputLowOnPin(GPIO_PORT_P1, GPIO_PIN0); tickcnt = sysTickCount; } // MAP_PCM_gotoLPM0(); } } /* * Port 1 interrupt handler. This handler is called whenever switches attached * to P1.1 (S1) and P1.4 (S2) are pressed. */ void PORT1_IRQHandler(void) { // newTick = MAP_SysTick_getValue(); uint32_t status = MAP_GPIO_getEnabledInterruptStatus(GPIO_PORT_P1); MAP_GPIO_clearInterruptFlag(GPIO_PORT_P1, status); /* Handles S1 button press */ if (status & GPIO_PIN1) { MAP_GPIO_setOutputHighOnPin(GPIO_PORT_P1, GPIO_PIN0); ADC_x_cen = ((AdcValue[6]<<8) | (AdcValue[7])); ADC_y_cen = ((AdcValue[4]<<8) | (AdcValue[5])); ADC_z_cen = ((AdcValue[2]<<8) | (AdcValue[3])); } /* Handles S2 button press */ if (status & GPIO_PIN4) { } } //![Single Sample Result] /* ADC Interrupt Handler. This handler is called whenever there is a conversion * that is finished for ADC_MEM0. */ void ADC14_IRQHandler(void) { uint64_t status = MAP_ADC14_getEnabledInterruptStatus(); MAP_ADC14_clearInterruptFlag(status); if (ADC_INT0 & status) { curADCResult = MAP_ADC14_getResult(ADC_MEM0); normalizedADCRes = (curADCResult * 3.3) / 16384; ADC_z[ADC_z_cnt++] = curADCResult; if(ADC_z_cnt == 5) { ADC_z_cnt = 0; ADC_z_cur = SortValue(ADC_z, 5); AdcValue[2] = ADC_z_cur>>8; AdcValue[3] = ADC_z_cur&0xff; } MAP_ADC14_toggleConversionTrigger(); } if (ADC_INT1 & status) { curADCResult = MAP_ADC14_getResult(ADC_MEM1); normalizedADCRes = (curADCResult * 3.3) / 16384; ADC_y[ADC_y_cnt++] = curADCResult; if(ADC_y_cnt == 5) { ADC_y_cnt = 0; ADC_y_cur = SortValue(ADC_y, 5); AdcValue[4] = ADC_y_cur>>8; AdcValue[5] = ADC_y_cur&0xff; } MAP_ADC14_toggleConversionTrigger(); } if (ADC_INT2 & status) { curADCResult = MAP_ADC14_getResult(ADC_MEM2); normalizedADCRes = (curADCResult * 3.3) / 16384; ADC_x[ADC_x_cnt++] = curADCResult; if(ADC_x_cnt == 5) { ADC_x_cnt = 0; ADC_x_cur = SortValue(ADC_x, 5); AdcValue[6] = ADC_x_cur>>8; AdcValue[7] = ADC_x_cur&0xff; } MAP_ADC14_toggleConversionTrigger(); } } /* * SysTick interrupt handler. This handler toggles RGB LED on/off. */ void SysTick_Handler(void) { sysTickCount++; } /* * EUSCI A0 UART interrupt handler. Receives data from GUI and sets LED color/blink frequency */ void EUSCIA0_IRQHandler(void) { int receiveByte = UCA0RXBUF; /* Send acknowledgement to the GUI */ MAP_UART_transmitData(EUSCI_A0_BASE, 'A'); MAP_UART_transmitData(EUSCI_A0_BASE, receiveByte); }