Other Parts Discussed in Thread: SYSBIOS
CANFD已经初始化并配置完成,编译并没有出错,程序加载到雷达后运行后出错。
console显示:
ti.sysbios.gates.GateMutex: line 99: assertion failure: A_badContext: bad calling context. See GateMutex API doc for details.
xdc.runtime.Error.raise: terminating execution
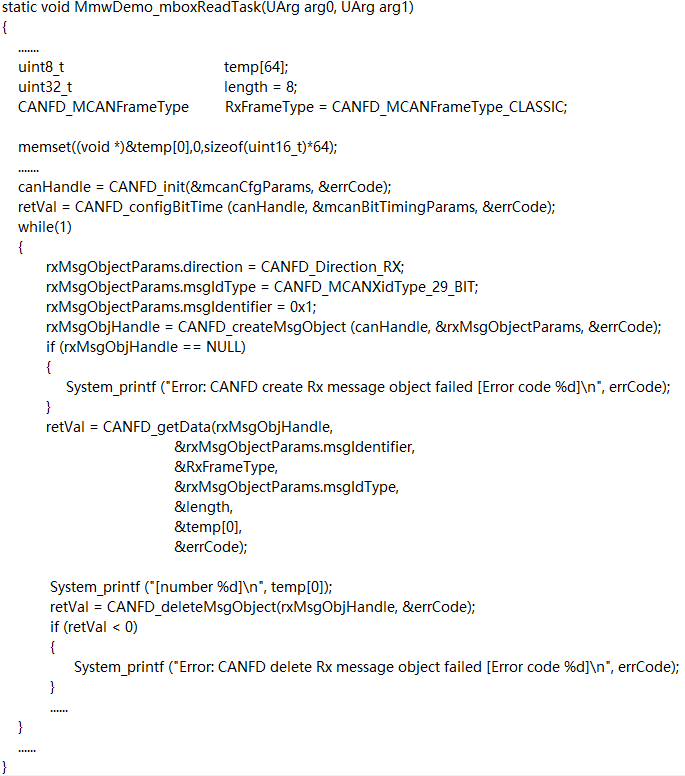
我在canfd.h中找到了CANFD_getData()这个函数,但是我在SDK的canfd测试程序中没有找到使用这个函数的例子。
CANFD的接收有参考吗?
程序中哪里可能出了问题?
感谢