Other Parts Discussed in Thread: IWR1843, IWR1843BOOST
您好,
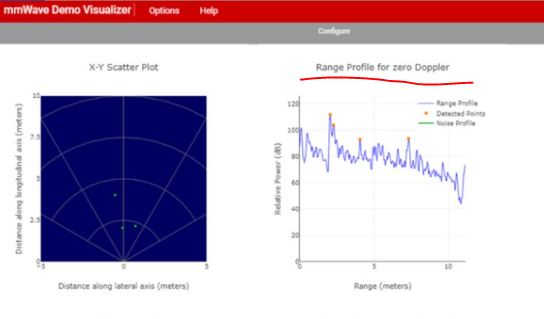
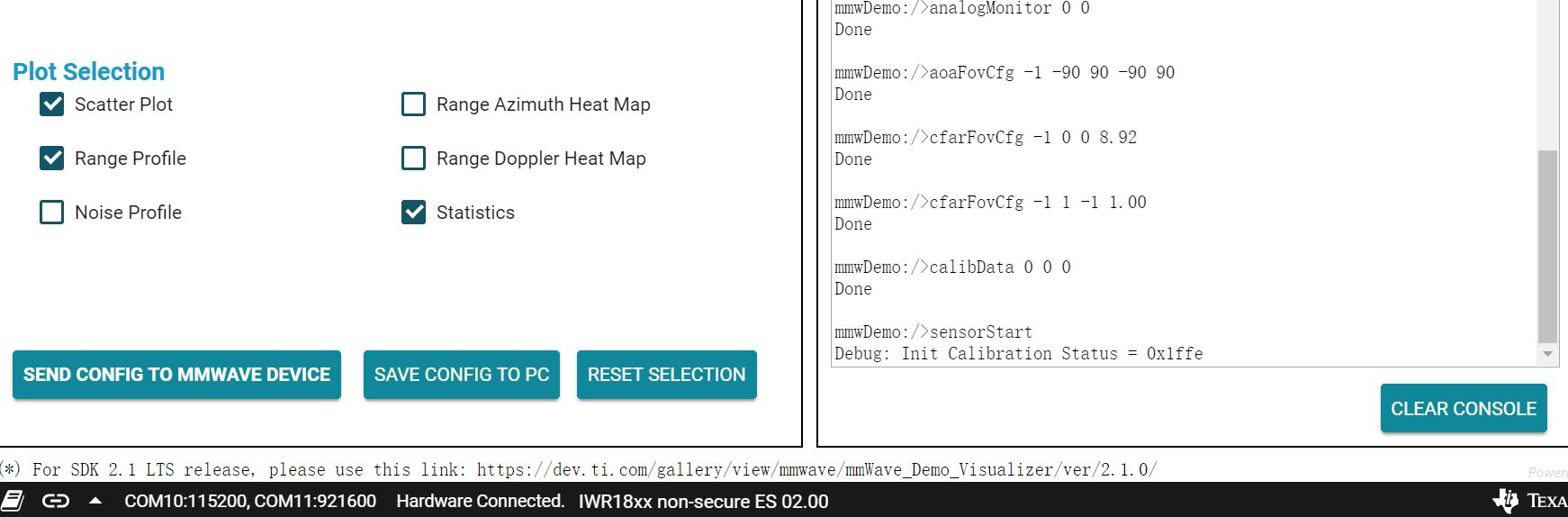
我现在已经在IWR1843的demo板中烧入最新的 traffic_monitoring 例程,并能够使用18xx_traffic_monitoring_70m_MIMO_2D.cfg正常地运行。
如果我想通过修改.cfg文件达到如下目标,该如何操作?
1. 只检测输出静止目标,不输出动目标,或者同时输出也行。
2. 探测距离设定为0-20米
3. 角度分辨率尽量高
我已经查阅了SDK user guide 和 pplcount_customization_guide 两份文档,但是没有找到合适的方式。
请帮忙修改一下.cfg文件,原始.cfg文件如下,多谢!
% ***************************************************************
% Created for Traffic Monitoring 18xx v2.0.x
% Frequency:77
% Platform:xWR18xx
% Azimuth Resolution(deg):15
% Range Resolution(m):0.366
% Maximum unambiguous Range(m):75.0
% Maximum Radial Velocity(m/s):13.52
% Radial velocity resolution(m/s):0.422
% Frame Duration(msec):50
% ***************************************************************
% *****************STANDARD MMWAVE SDK COMMANDS******************
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 5 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
profileCfg 0 77 8 7 28 0 0 20 1 256 12500 0 0 48
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 4
frameCfg 0 1 64 0 50 1 0
lowPower 0 0
guiMonitor -1 1 0 0 0 0 0
cfarCfg -1 0 2 8 4 3 0 10 0
cfarCfg -1 1 0 4 2 3 1 12 0
multiObjBeamForming -1 1 0.5
clutterRemoval -1 1
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 1
bpmCfg -1 0 0 1
lvdsStreamCfg -1 0 0 0
compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
CQRxSatMonitor 0 3 5 121 0
CQSigImgMonitor 0 127 4
analogMonitor 0 0
aoaFovCfg -1 -90 90 -90 90
cfarFovCfg -1 0 0 80
cfarFovCfg -1 1 -30 30.00
% *****************TRACKING COMMANDS*****************************
staticBoundaryBox -40 40 20 70 -3 3
boundaryBox -50 50 10 80 -3 3
gatingParam 20 15 15 15 200
stateParam 15 10 10 1000 10 1000
allocationParam 60 50 1 3 5 50.0
maxAcceleration 50 50 0.1
trackingCfg 1 2 250 20 135 422 50
sensorPosition 2 0 0
presenceBoundaryBox -3 3 2 6 0.5 2.5
% *****************SENSOR START*********************
sensorStart