

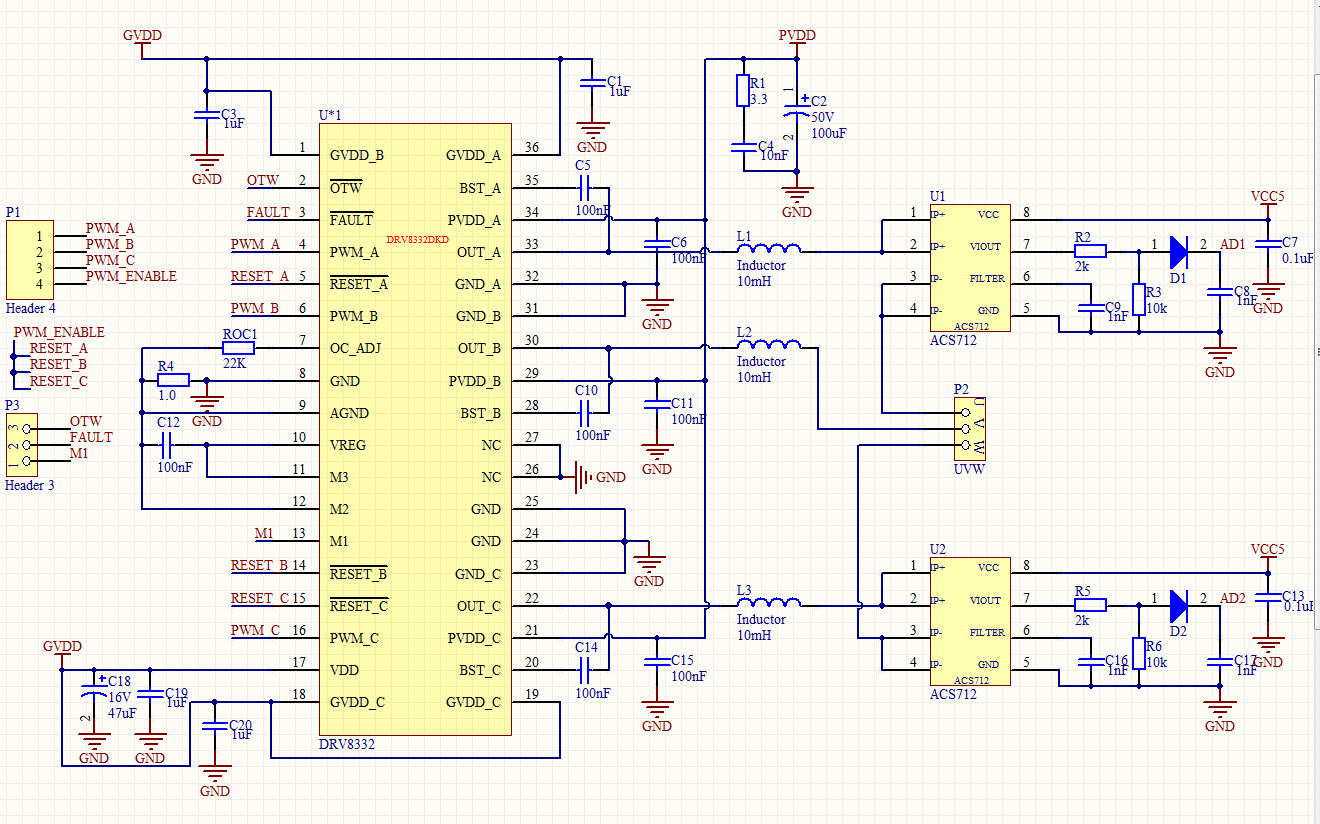
上图是我用DRV8332做矢量控制的硬件设计图,图中GVDD为12V,PVDD为48V供电,电路还没打样,现在想请问一下TI工程师关于8332的用法,不知我图中的用法是否正确。
我放弃使用采样电阻,将GND_X都直接接地了,OUT_X后面接了霍尔电流传感器采样电流。
现在有几个问题:
1. 我这种直接将GND_X直接接地,OUT_X接霍尔电流传感器的用法是否可以,如果是这种电流传感器,那边OUT_X后面接的电感是需要接还是不接,是接在电流传感器的输入端还是输出端。
2. PVDD为48V输入,datasheet中计算电感的公式的单位是什么。
3. 图中R1,C2,C4的取值在48V时是否正确,特别是C2,因为我想减少板子的尺寸,图纸使用的都是贴片元件,如果能采用更小的取值,封装的体积会有所减小。
3.关于PWM_X和RESET_X的用法,看了datasheet后我的理解是RESET_X相当于PWM使能,高电平PWM使能,低电平PWM使能不输出。于是在图中我将RESET_X全部连接到DSP的一个IO作为PWM的使能控制,留下PWM_X作为正常的PWM。
4. 由于我原来的FOC程序是用6路互补的PWM来写的,并且设置的死区时间,现在换了这款驱动芯片,不想改程序,按照我图中的用法,只将DSP的高端PWM作为8332的输入,DSP的低端PWM直接悬空不接,在用一个IO置高电平连接全部的RESET_X以使能电机输出,我这种用法是否妥当。
希望TI工程师和给我好友能帮我解惑,感谢!
