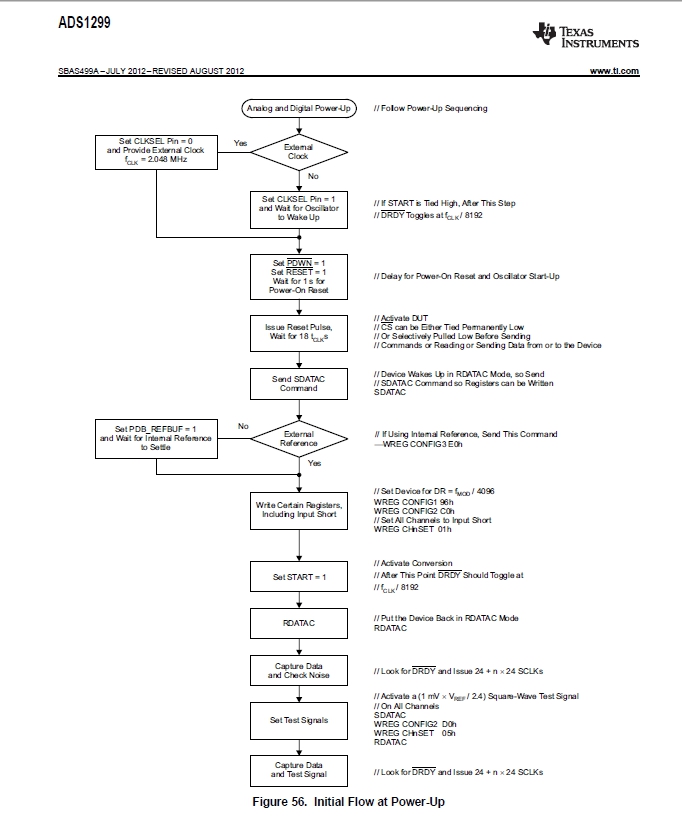
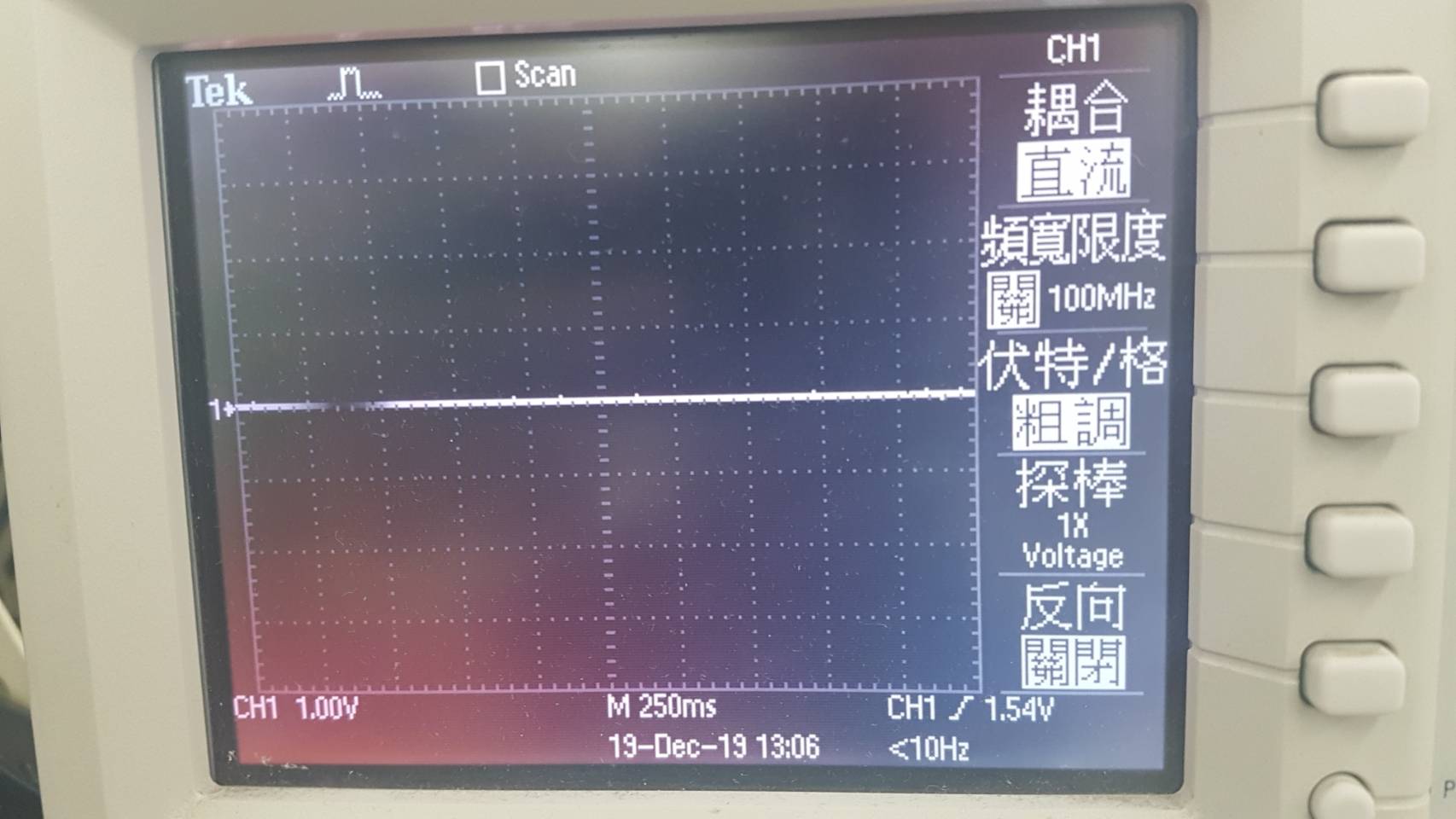
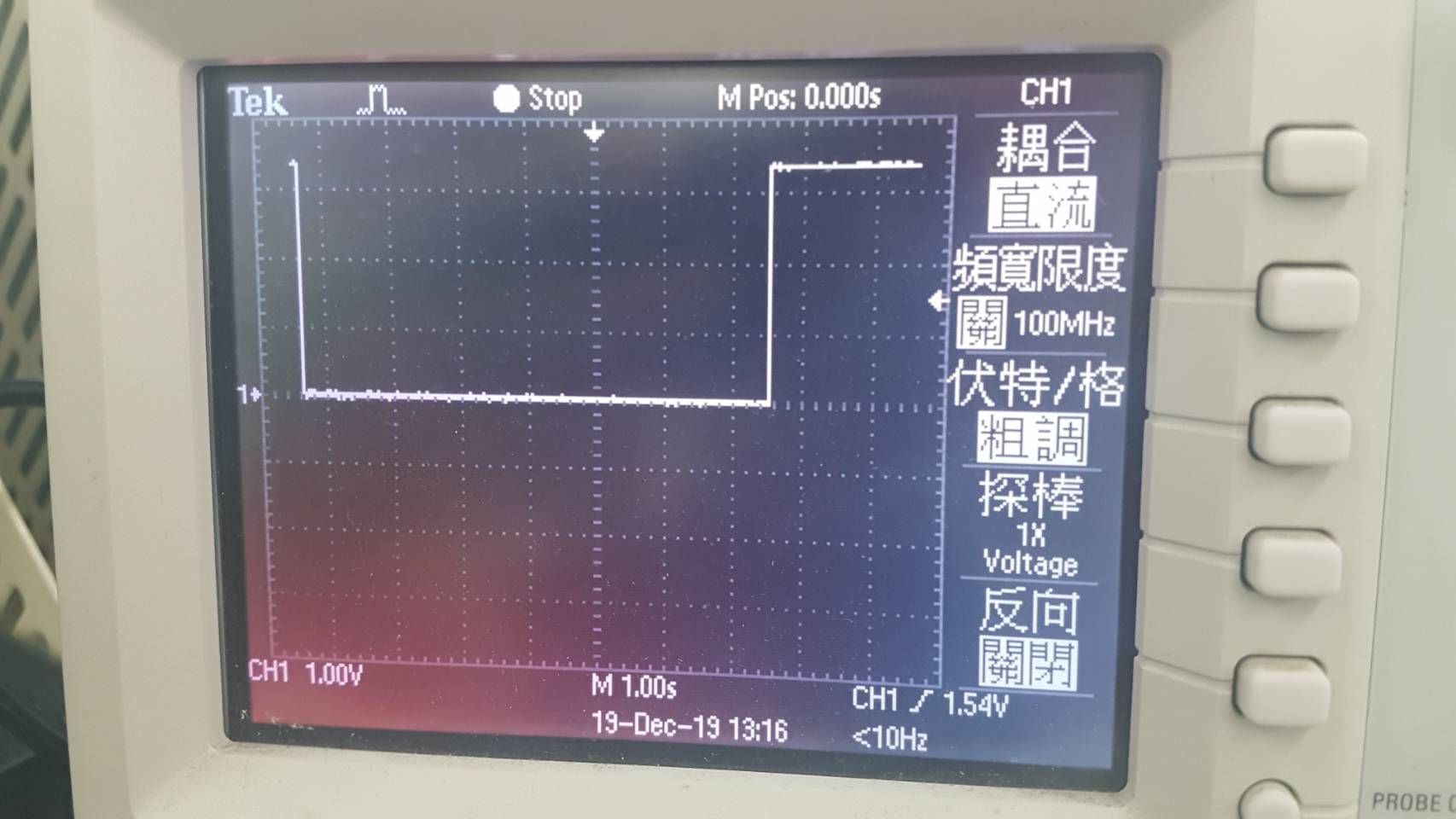
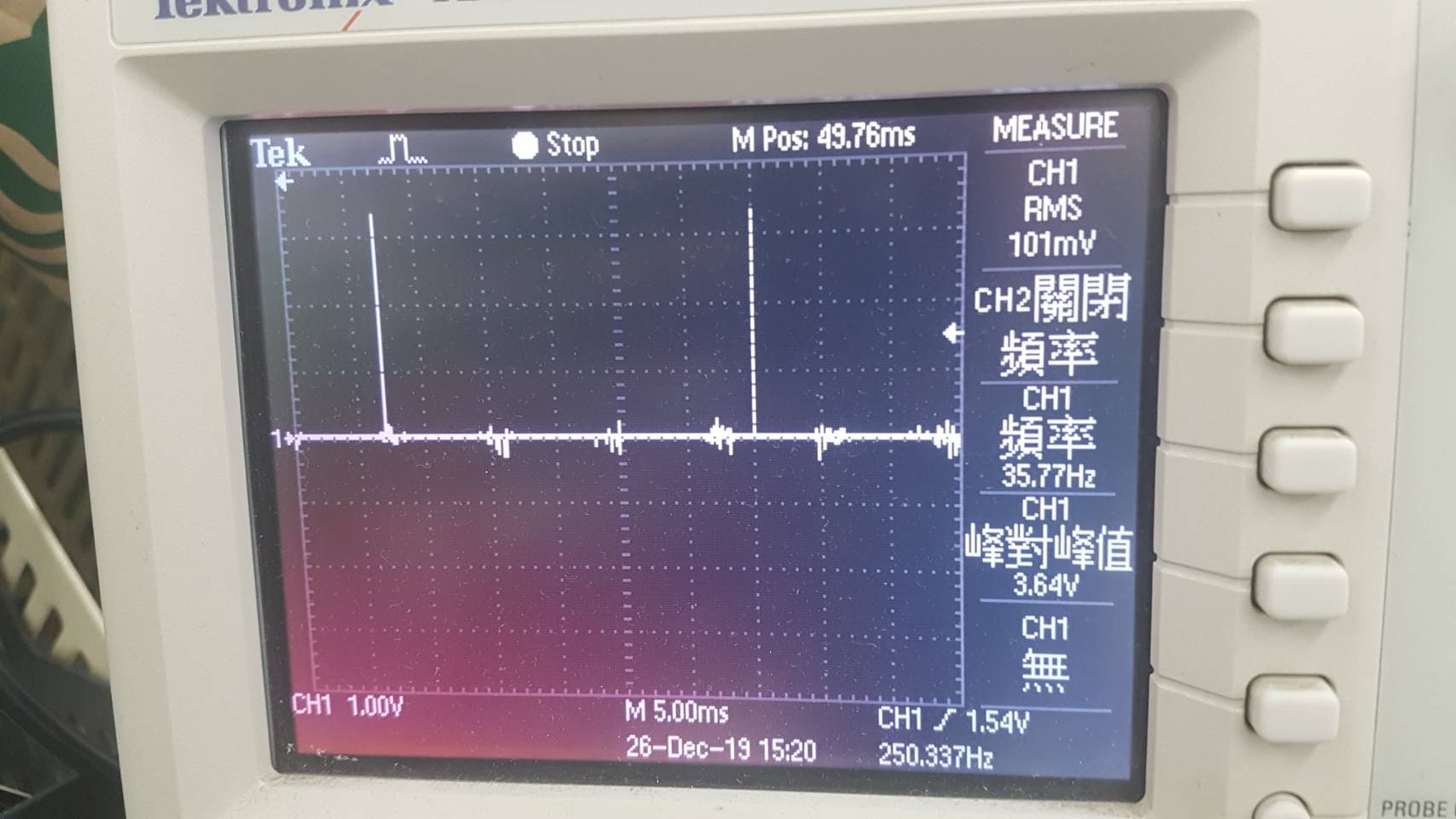
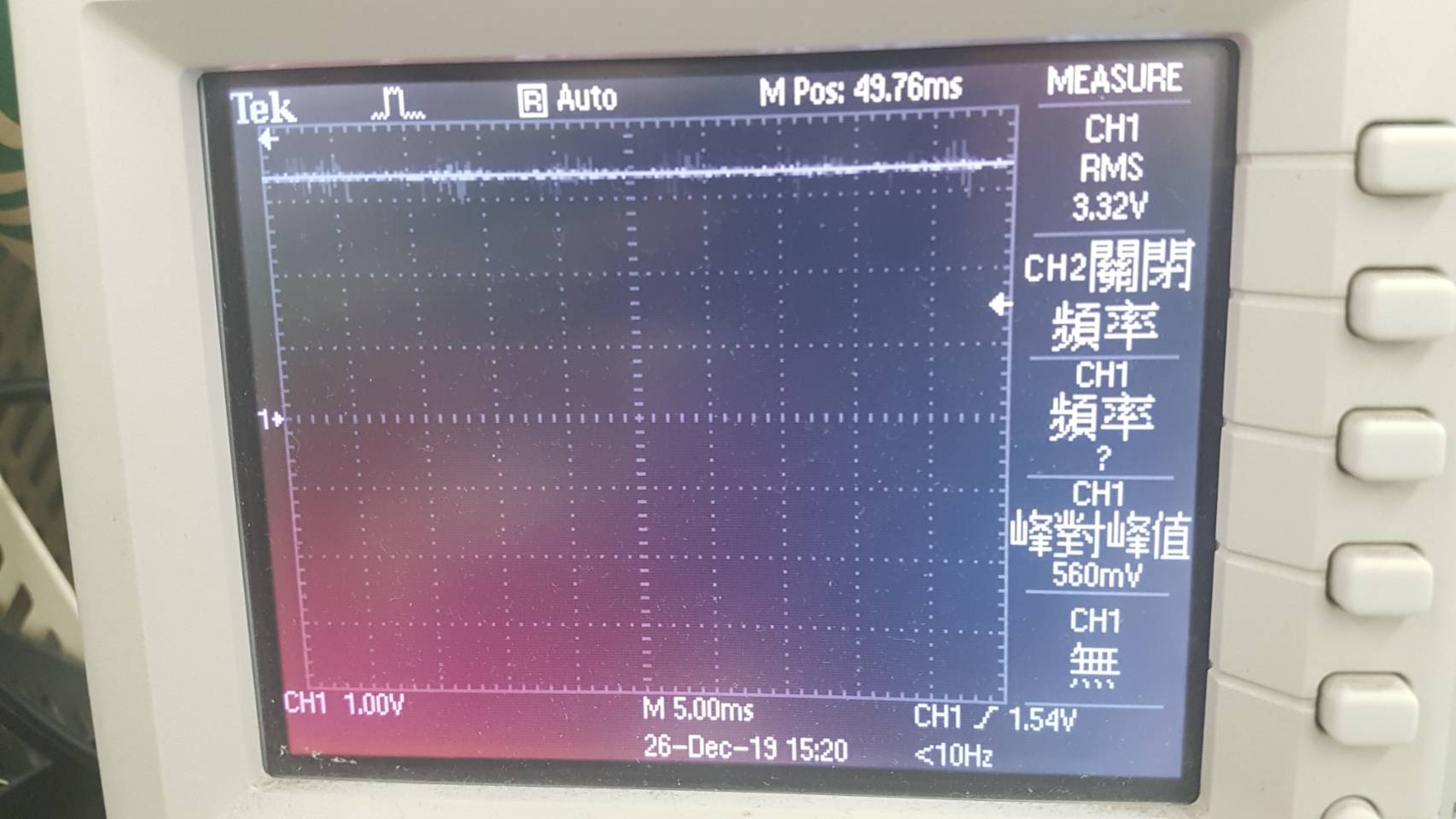
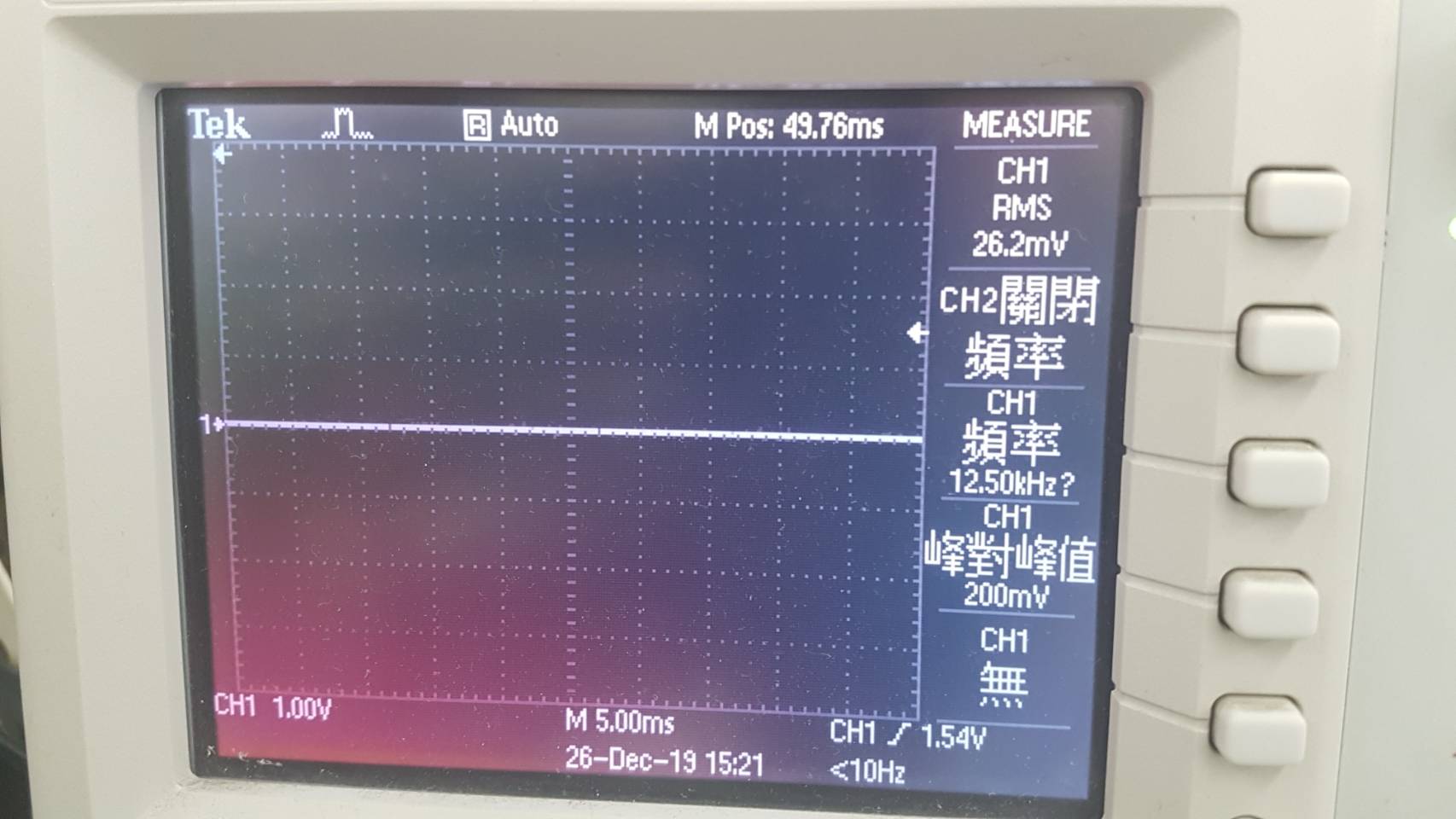
DRDY理論上應該跟數據表第58頁的步驟三一樣,應該是2.048MHz / 8192 = 250Hz,但是我的只有150Hz,並且我的SPI的CLK為LOW,DIN、DOUT則為High,而不是方波,請指教感謝!
#include "ti/devices/msp432p4xx/inc/msp.h"
#include <stdint.h>
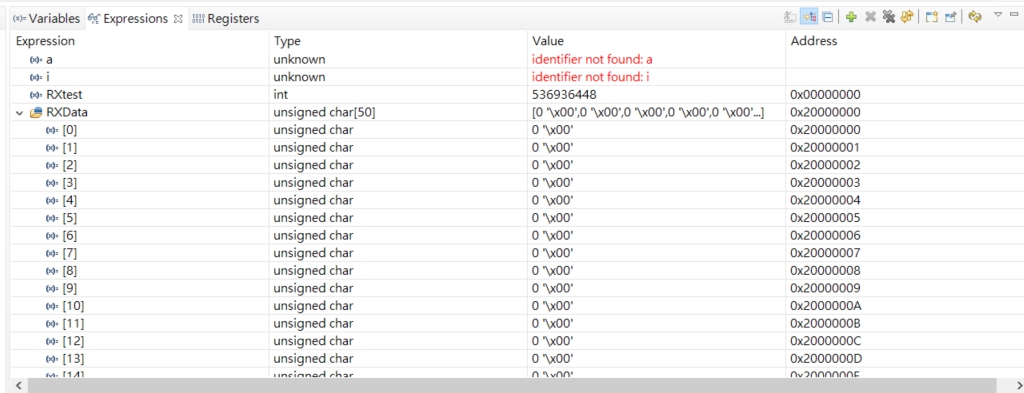
static uint8_t RXData[100];
static uint8_t TXData;
static char i;
#define HZ 3000000UL//3MHZ MCLK
int RXtest ;
int main(void)
{
////////////////////////////////////////////////////SPI////////////////////////////////////////////////////////////////////////
WDT_A->CTL = WDT_A_CTL_PW | // Stop watchdog timer
WDT_A_CTL_HOLD;
P1->SEL0 |= BIT5 | BIT6 | BIT7; // Set P1.5, P1.6, and P1.7 as
// SPI pins functionality
//P3->DIR |= BIT0; // P3.0 set as output CS
EUSCI_B0->CTLW0 |= EUSCI_B_CTLW0_SWRST; // Put eUSCI state machine in reset
EUSCI_B0->CTLW0 = EUSCI_B_CTLW0_SWRST | // Remain eUSCI state machine in reset
EUSCI_B_CTLW0_MST | // Set as SPI master
EUSCI_B_CTLW0_SYNC | // Set as synchronous mode
EUSCI_B_CTLW0_CKPL_OFS | // Set clock polarity low
EUSCI_B_CTLW0_CKPH | //Phase high
EUSCI_B_CTLW0_MSB; // MSB first
EUSCI_B0->CTLW0 |= EUSCI_B_CTLW0_SSEL__ACLK; // ACLK
EUSCI_B0->BRW = 0x01; // /2,fBitClock = fBRCLK/(UCBRx+1).
EUSCI_B0->CTLW0 &= ~EUSCI_B_CTLW0_SWRST;// Initialize USCI state machine
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
CS_Low();
__delay_cycles(HZ);
P5->DIR |= BIT1;
P5->OUT = BIT1; //PWDN High
__delay_cycles(HZ);
P2->DIR |= BIT7;
P2->OUT ^= BIT7; //RESET Low
__delay_cycles((4*HZ)/1000);
P2->DIR |= BIT7;
P2->OUT = BIT7; //RESET High
__delay_cycles(HZ);
P2->DIR |= BIT6;
P2->OUT |= BIT6; //Set Start High
__delay_cycles(HZ/1000);
P3->DIR |= BIT5;
P3->OUT = BIT5; //CLKSEL High
__delay_cycles(HZ/1000);
__delay_cycles(HZ/1000);
WREG(0x00 + 0x40,0x10); //channel1 Normal electrode input 0x60
WREG(0x01 + 0x40,0x96);//Config1 92=>4K 採樣率
WREG(0x02 + 0x40,0xD0);//Config2 0xC0
WREG(0x03 + 0x40,0xE0);//Config3
WREG(0x04 + 0x40,0x00); //LOFF
WREG(0x05 + 0x40,0x65); //channel1 Normal electrode input 0x60
WREG(0x06 + 0x40,0x65); //channel2
WREG(0x07 + 0x40,0x65); //channel3
WREG(0x08 + 0x40,0x65); //channel4
WREG(0x09 + 0x40,0x65); //channel5
WREG(0x0A + 0x40,0x65); //channel6
WREG(0x0B + 0x40,0x65); //channel7
WREG(0x0C + 0x40,0x00); //channel8
WREG(0x0D + 0x40,0x00); //BIASSENSP
WREG(0x0E + 0x40,0x00); //BIASSENSN
WREG(0x0F + 0x40,0x00); //LOFF_SENSP
WREG(0x10 + 0x40,0x00); //LOFF_SENSN
WREG(0x11 + 0x40,0x00); //LOFF_FLIP
WREG(0x12 + 0x40,0x00); //LOFF_STATP
WREG(0x13 + 0x40,0x00); //LOFF_STATN
WREG(0x14 + 0x40,0x00); //GPIO
WREG(0x15 + 0x40,0x00); //MISC1
WREG(0x16 + 0x40,0x00); //MISC2
//P2->DIR |= BIT6;
//P2->OUT = BIT6; //Set Start High
//__delay_cycles(HZ);
RDATAC();
RXData[i] = EUSCI_B0->RXBUF;
}
void spiTx (uint8_t byte)
{
while(EUSCI_B0->IFG & EUSCI_B_IFG_TXIFG)
{
EUSCI_B0->TXBUF = byte; // Transmit characters
}
}
void spiRx (void)
{
if (EUSCI_B0->IFG & EUSCI_B_IFG_RXIFG)
{
// USCI_B0 TX buffer ready?
RXtest = 1;
// Echo received data
}
RXData[0] = EUSCI_B0->RXBUF;
}
void CS_High (void)
{
P3->DIR |= BIT0; //Set P3.0腳位
P3->OUT = BIT0; //CS_High
}
void CS_Low (void)
{
P3->DIR |= BIT0;
P3->OUT ^= BIT0; //CS_Low
}
void RESET(void)
{
spiTx(0x06);
__delay_cycles((12*HZ)/1000000);
}
void SDATAC(void)
{
spiTx(0x11);
__delay_cycles((4*HZ)/10000);
}
void WREG(uint8_t _address, uint8_t value)
{
uint8_t opcode1 = _address + 0x40;
spiTx(opcode1);
spiTx(0x00);
spiTx(value);
}
uint8_t RREG(uint8_t _address)//在RDATAC模式下,RREG指令會被忽略(datasheet P35)
{
uint8_t opcode1 = _address + 0x20;
spiTx(opcode1);
spiTx(0x00);
}
void RDATAC(void)
{
spiTx(0x10);
__delay_cycles((3*HZ)/1000);
}
void START(void)
{
spiTx(0x08);
}
void Testsignal(void)
{
void SDATAC();
__delay_cycles(HZ);
WREG(0x02 + 0x40,0xD0);
WREG(0x05 + 0x40,0x05);
void RDATAC();
}