Part Number: TCAN4550
m_can.rar
附件为linux平台的驱动,下面是对应驱动的dts配置
tcan4x5x: tcan4x5x@0 {
status = "okay";
compatible = "ti,tcan4x5x";
reg = <0>;
#address-cells = <1>;
#size-cells = <1>;
spi-max-frequency = <18000000>;
bosch,mram-cfg = <0x0 0 0 10 0 0 10 10>;
interrupt-parent = <&ls_gpio0_porta>;
interrupts = <1 IRQ_TYPE_EDGE_FALLING>;
reset-gpios = <&ls_gpio0_porta 0 GPIO_ACTIVE_HIGH>;
}; spi-max-frequency = <10000000>;
bosch,mram-cfg = <0x0 0 0 16 0 0 1 1>;
interrupt-parent = <&ls_gpio0_porta>;
interrupts = <12 IRQ_TYPE_EDGE_FALLING>;
reset-gpios = <&ls_gpio0_porta 7 GPIO_ACTIVE_HIGH>;
};
};
在地平线旭日X5系统上,can的回环测试能通过,但是与l另一个can外设发送/接收的数据都不能正常
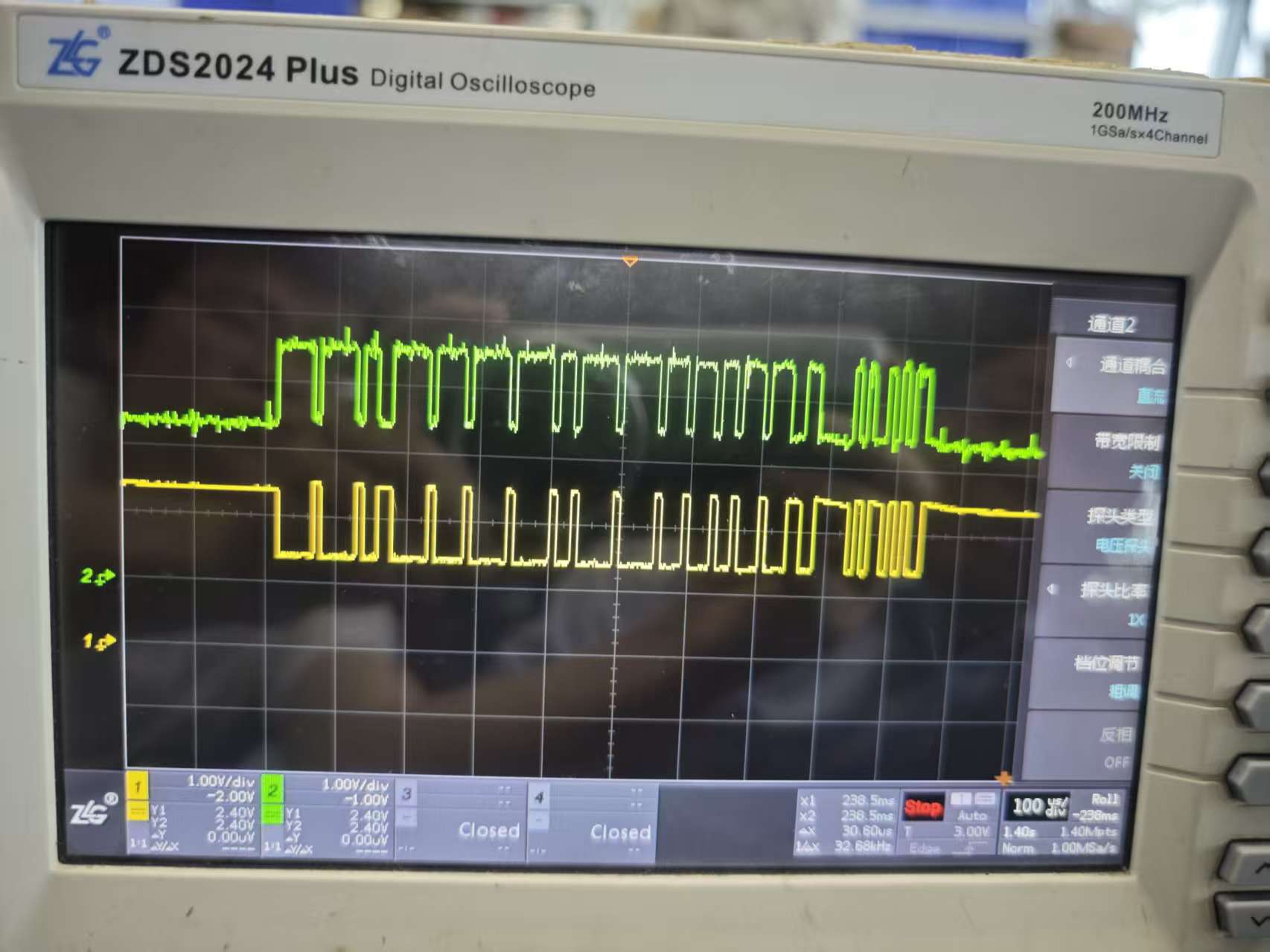
以下是单次发送数据帧(扩展帧,帧id0x100内容0x00112233)时的can_H can_L信号,信号持续了约5s左右且都在重复这个信号,麻烦看下哪里有问题。