请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-3PHGANINV 工具/软件:
大家好、
我使用的是 AM263P LP 和 BOOSTXL_3PhGANINV 驱动器板和 Linix 45ZWN24-40 BLDC 电机。 我已经成功通过了通用电机控制示例的前3个等级。
在 DMC_LEVEL_4中
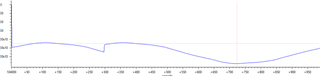
、首先、电机根据基准速度旋转。 2-3秒后、电机转速根据参考速度降低。
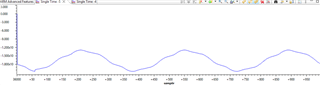
此外、速度以恒定模式持续变化。
我应该如何继续?
此致、
BURAK