请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:PGA113 主题中讨论的其他部件: MSP430F6659
您好,
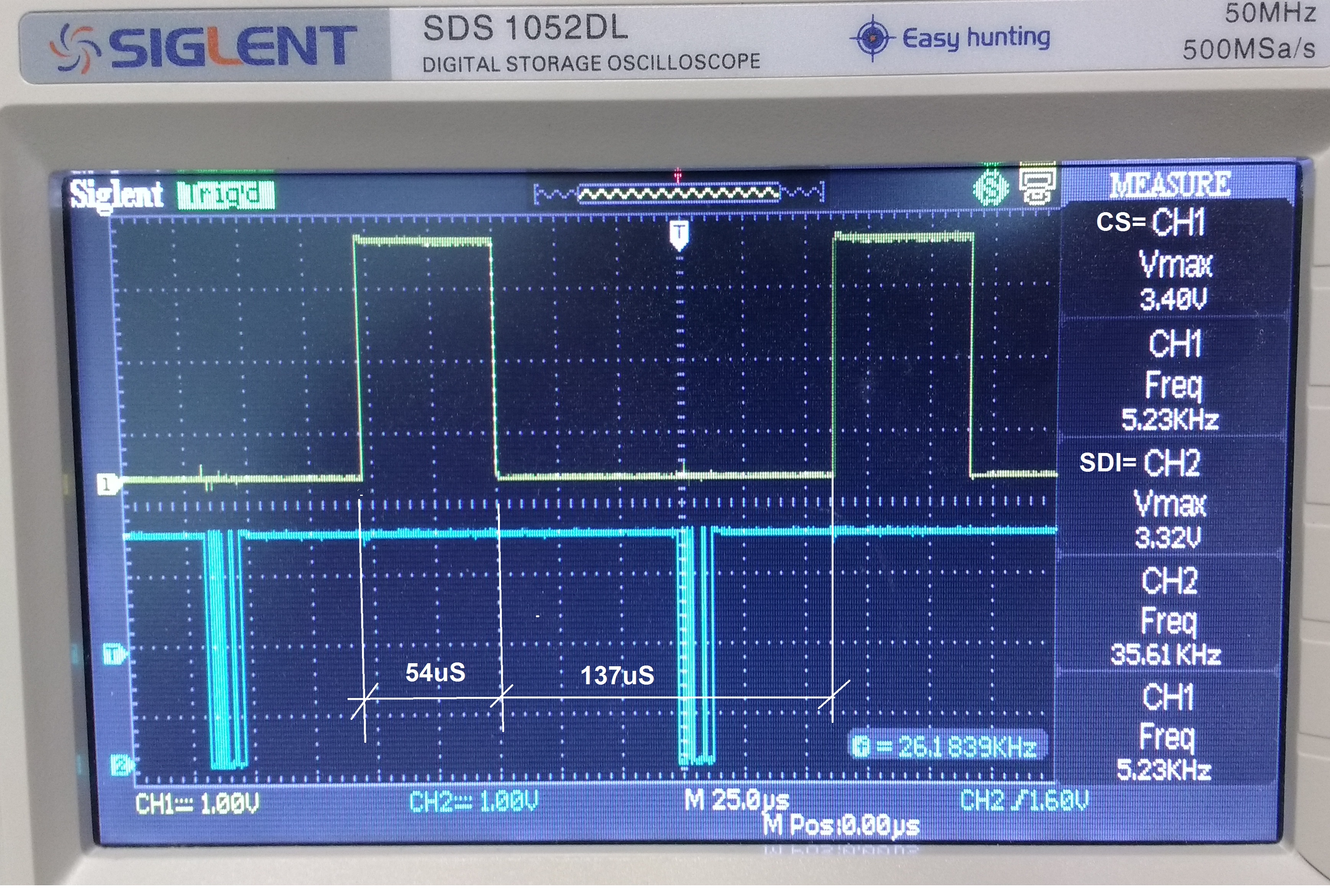
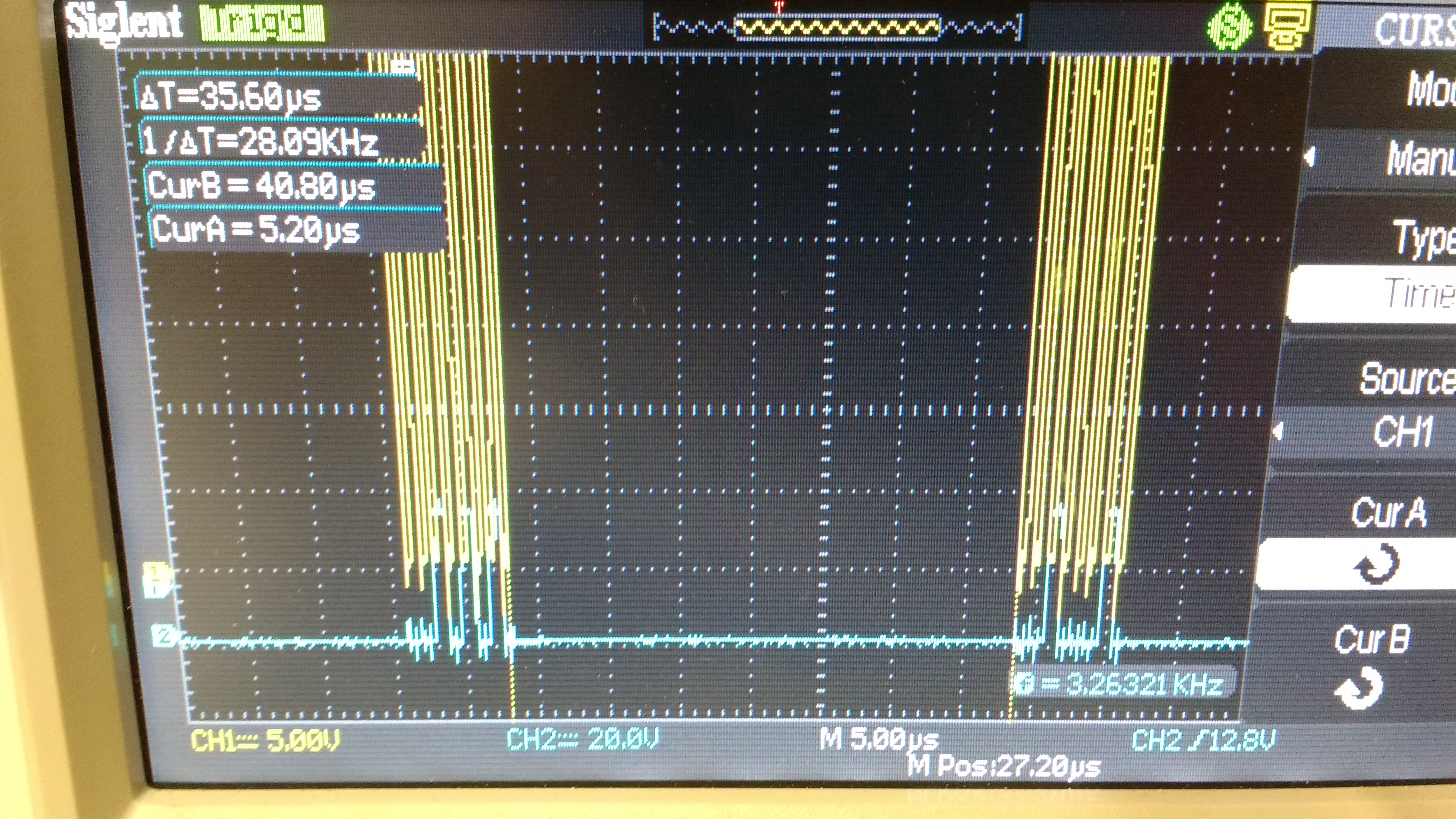
我试图通过SPI使用MSP430F6659来运行PGA113。 首先,我在第一个8位和第二个8位之间延迟了35.6 Us,如下一张照片所示:
我唯一能解决这一问题的方法是再次写入缓冲区,而不询问它是否可用, 如ISR所示
UCA0TXBUF= PGA_Data1;//eSCRIBE有效期
UCA0TXBUF= PGA_Data2;//eSCRIBE菜单有效
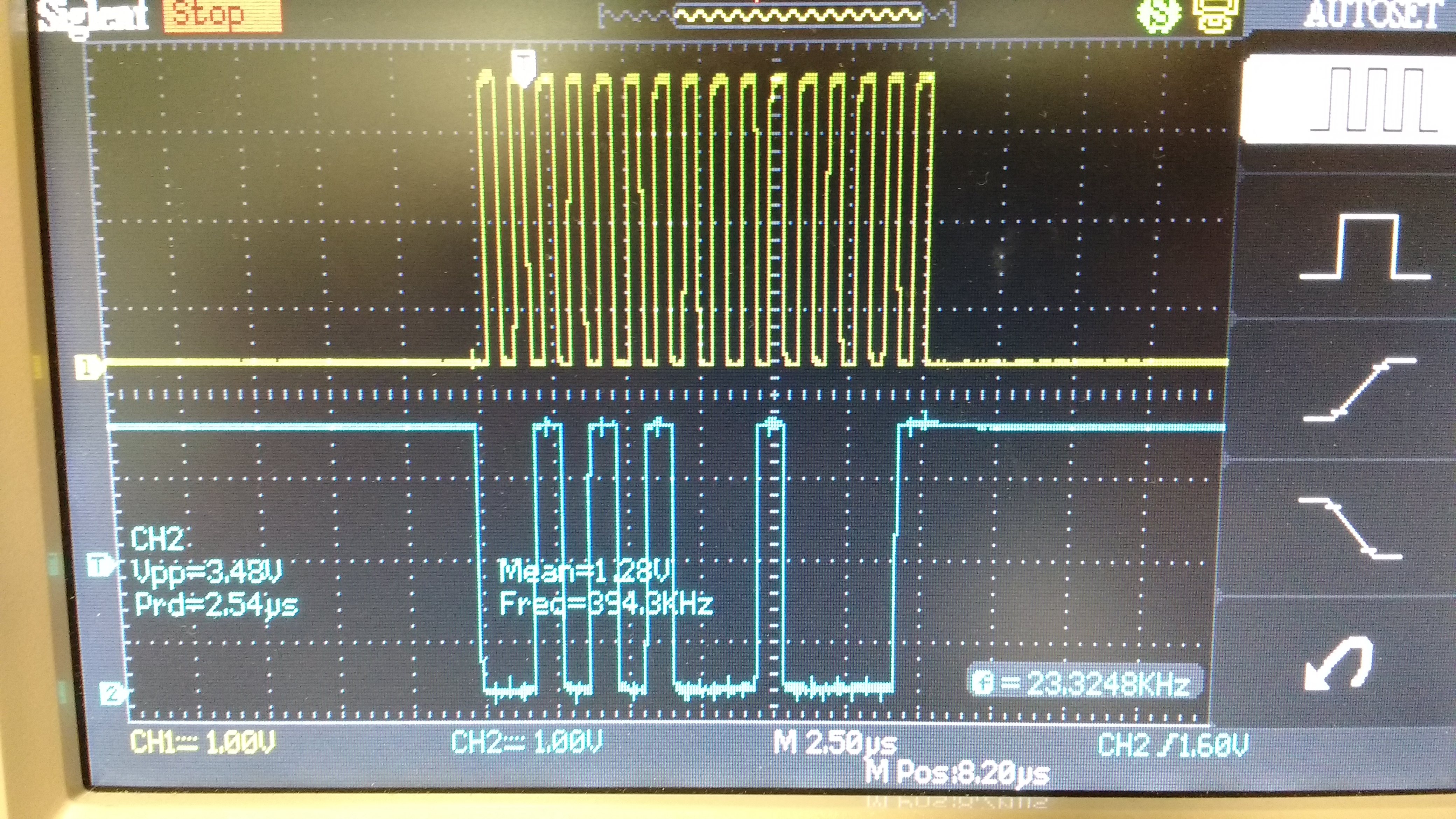
我正在使用SPI模式10。 我发送的数据是0x2A21 (Gain = 5 CH=1)或0x2A20 (Gain = 5 CH=0)。 Vref=GND,AVDD=DVDD=5V。 数据在PGA启用的时间间隔内正确发送
在不连接SPI引脚的情况下,如果CH0/CH1连接至GND,则输出为0v。 当我将直流电源连接到CH1或CH0 (根据命令),并且输入电压从0v到0.5V不等时,输出仍为0v。 这些值是我用其他PGA113制造的第二个PCB的值,第一个和相同的条件下输出是1.23v或3V,其中的一些值,但它也没有通过改变输入来改变。
我认为我的问题是沟通上的问题,但我看不到。 我也认为我尊重SPI计时
我的代码是:
main.c:
// MSP430F6659
// --------
// /|\\| |//
|| |//
--|RST WFP 1.0 |-> LED
// | |//
| WFP 2.4 (UCA0SIMO)|-> Data Out (UCA0SIMO)
//(数据输出) | |//
| WFP 2.5 |<-数据输入(UCA0SOMI)
// | |//
PGA CS <-|WFP 5.2
串行时钟输出(UCA0CLK)#include <MSP40.0.h>#include "SPI.h"#define LED_DIR P1DIR #define LED_OUT P1OUT #define 2.3 BIT0 #define PGA_DIR P5DIR #define PGA_OUT P5OUT //POR 5.2 引脚28 #define PGA_DataCS BIT2 int P1= 0;0 = 0;0 = 0
;0 = 0;0;0 = 0;0;0 = 0;0;0;0;0 = 0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0; //Ganancia 5 CH0
void main(void){
WDTCTL = WDTPW | WDTHOLD;// 停止看门狗计时器
Port_Mapping();//LLamo funcion que me mapea los Puertos del SPi.
INIT_SPI();//LLamo funcion que配置SPI
PGA_DIR |= PGA_CS;//定义como salida WFP 3.0 que es el CS del PGA
PGA_OUT |= PGA_CS;//解氧度PGA
__enable_interrupit(); //重新启用所有中断
LED_DIR || LED;//定义COO SALIDA EL WFP 1.0
LED_OUT &=~ LED;//Apago el LED
while (1){//---------------
Tx SPI PGA-----------------------------------
__delay_cycles(50);
PGA
^&=~ PGA_CS;//Habilito PGA (activo por bajo)__delay_cycles(50);n=1;UCA0IE |= UCTXIE;// Habilito中断转换(al hito Deshabilta Salta a la })__delay_cycles(50);!-------- PGA
输出--------------
}
}//------------------
RUTINA DE INTERRUPCION SPI------------------
#pragma vector=USI_A0_vector //vector de inter流,hay uno solo para transmicion y reconcion
__interrupt void USI_A0_ISR(void)
{
SWITCH(__偶 数_IN_RANGE(UCA0IV,4))//Pregunta por UCA0IV, que es registro de vectores de interrupt on
/
genericio
案例0:中断; //矢量0 -无中断//无干草中断点
案例2:中断; //矢量2 - RXIFG //se recebio un Dato
案例4: //矢量4 - TXIFG //El buffer de transmision esta libre
交换机(n){
案例0:
UCA0IE &=~ UCTXIE;// Deshabilita interrupion
中断;
案例1:
UCA0TXBUF= PGA_Data1;//eSCRIBE有效期
UCA0TXBUF= PGA_Data2;//eSCRIBE菜单有效
UCA0IE &=~ UCTXIE;// Deshabilita interrupion
中断;
案例2:
中断;
默认值:break;
}
默认值:break;
}//----------------------------------
SPI.h:
#include <MSP40.0.h>
#define SPI_MODO _00 0
#define SPI_MODO _01 1
#define SPI_MODO _10 2
#define SPI_MODO _11 3
#define MSP4S_SPI_MODO SPI_MODO SPI_10 //cambiar quiel modo de ****************************************************************************************************************************************************************************************************************************************//ACA****
// Funcion:Port_Mapping
// Configuracion el mapeo de Puertos para el SPI
//****************************************************************************************************************************************************************************************
void Port_Mapping(void);
//********************************************************************************************************************************************************
//********************************************************************************************************************************
//功能:init_spi
//配置acion del USCI A0 SPI
//****************************************************************************************************************************************************************
void Init_SPI (void);
//************************************************************************************************************************************************************************
SPI.C:
#include "SPI.h"
//********************************************************************************************************************************************************************************************************************************************************
// Funcion:Port_Mapping
// Configuracion el mapeo de Puertos para el SPI
//****************************************************************************************************************************************************************************************
void Port_Mapping(void){__disable_interrupti();//
在更改端口映射寄存器
PMAPKEYID=PMAPKEY;//esribir
la key 2D52h me garantiza acceso de esura crita todos los registros de control de mapeo de Puertos
//Para cada port pin Px.y que tiene la regularunable pista, mapponesa.
P2MAP3 = PM_UCA0CLK;//WFP 2.3 conecto el CLK (15号插针博内拉)
P2MV4 = PM_UCA0SIMO;//WFP 2.4 conecto el SIMO (16号插针硼拉)
P2MAP5 = PM_UCA0SOMI;//WFP 2.5 2.3 2.5 2.3 2.5 conecto el SOMI (Pin 17 bornera)
PMAPKEYID = 0;//Escribendo cualendo cualquier valor desabilito el accesso al Port Mapping
SEL 2DIR |= BIT3|BIT4|BIT5;//SelectivoPOR 2.4 funciono/
~2= 2.4
//********************************************************************************************************************************
//功能:init_spi
//配置acion del USCI A0 SPI
//****************************************************************************************************************************************************************
void Init_spi (void){
UCA0CTL1 |= UCSWRST;//**将状态机置于RESET状态**
#IF (MMSP430_SPI_MODO == UCA0CTL0|=
UCMST|UCSYNC|UCMSB;// 3引脚,8位极性主控,MSB,Modo 0:时钟fase,SPI_NC_UCCM1= 0
,USPI0SPI_UCCM1=
0 时钟fase low y时钟极性高
#endif
(MSP430_SPI_MODO == SPI_MODO)
UCA0CTL0 |= UCMST|UCSYNC|UCMSB|UCCSPI KPH;// 3引脚,8位主控,MSB,MODO 1 0:时钟频率高,时钟极性#ENDIF|UCCSPL|USPI=8
引脚,UCCSPI_B|SPIF_UCCSPIB|MPH_UCCSPIF= 时钟频率高y时钟极性高
#endif
UCA0CTL1 || UCSSEL_2;// SMCLK (定义时钟)
UCA0BR0 = 0;// Si quisiera dividir el SMCLK cambiar ACA
UCA0BR1 = 0;//
UCA0MCTL = 0;//无调制
UCA0CTL1 &=~ UCSWRST;//**初始化USCI状态机**
}//************************************************************************************************************************************************************************