Other Parts Discussed in Thread: TLV3601, BUF634A
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TLV3601 主题中讨论的其他部件: BUF634A
TI团队,您好!
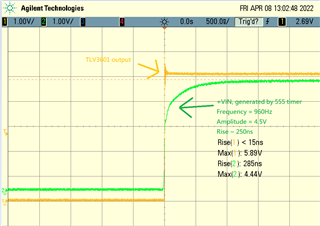
我使用555计时器生成1kHz的时钟,振幅为4.5V。
时钟信号的上升时间为250ns。
我把这个时钟输入TLV3601比较器。 VIN设置为2.5V或1V。
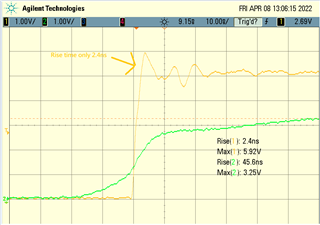
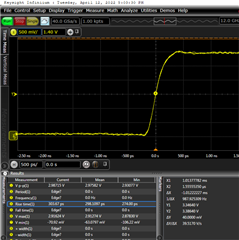
我测量了TLV3601的输出信号,上升时间为2.5ns。
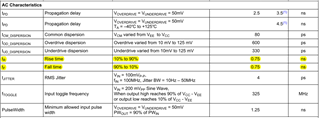
但根据数据表 交流特性,上升时间应为0.75ns。
如何通过TLV3601获得0.75ns的上升时间输出?
谢谢你。
SK