Other Parts Discussed in Thread: INA2180-2181EVM, INA2181, INA240
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:INA2181 主题中讨论的其他部件:INA2180-2181EVM,2181, INA241, INA240
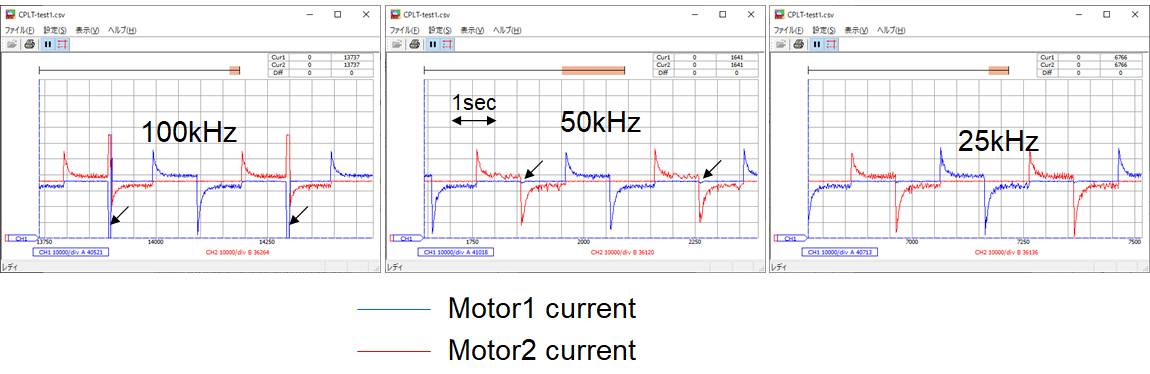
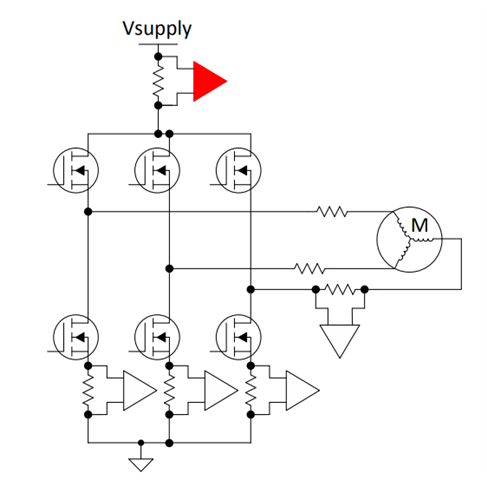
•两个电机交替驱动,其电流由INA2181A1IDGSR (R=Imax=2A)监控50 m。Ω
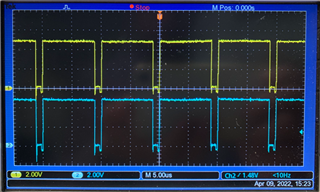
•in2 --> in1的串扰较大,而in1 --> in2的串扰则不大。(IN1连接到Motor1,in2连接到Motor2)
•串扰与PWM频率大致成比例。
•是否有减少串扰的好方法?