请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:OPA2210 主题中讨论的其他器件:OPA657、 OPA828、 OPA192、 OPA4192、 OPA211
您好!
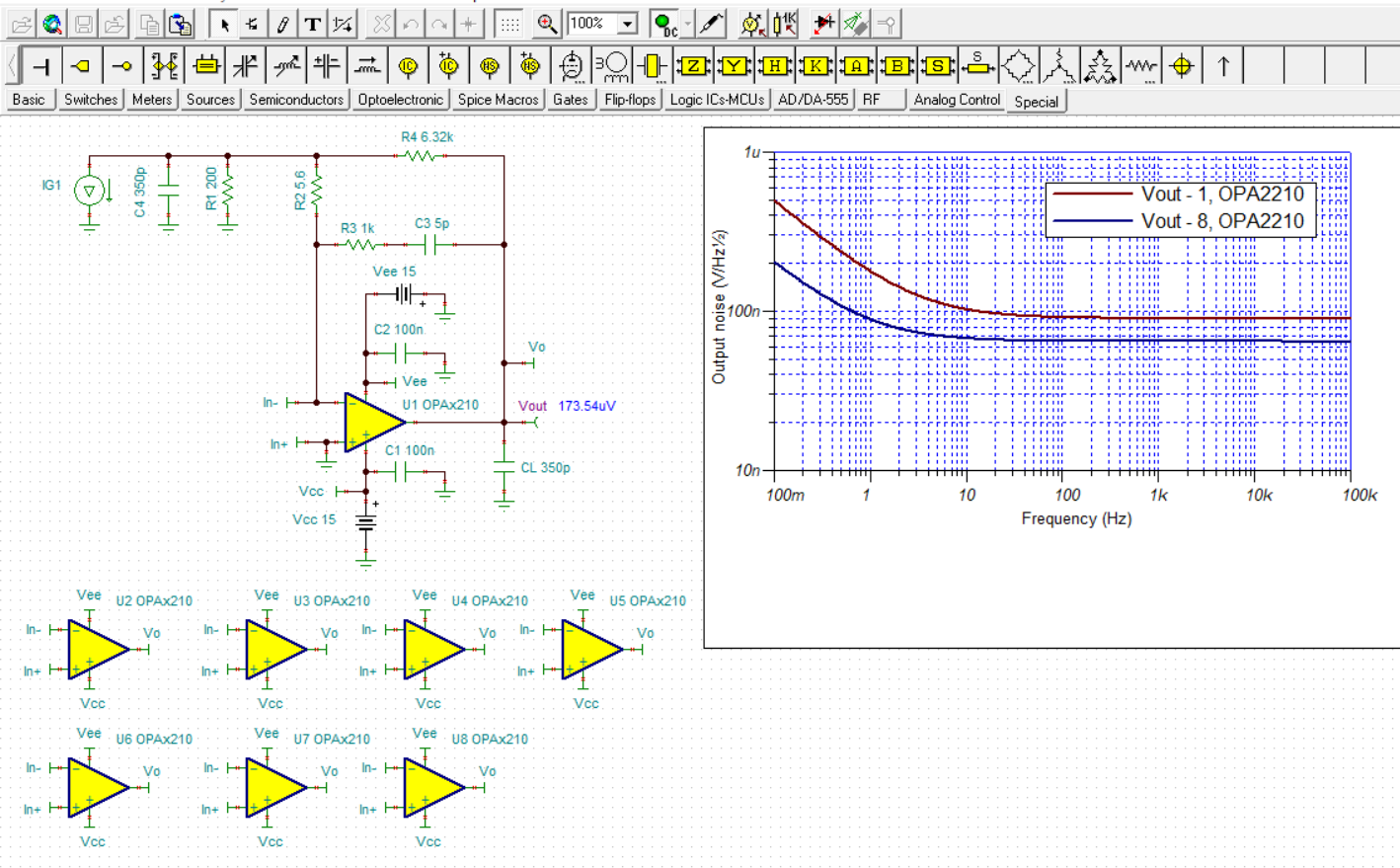
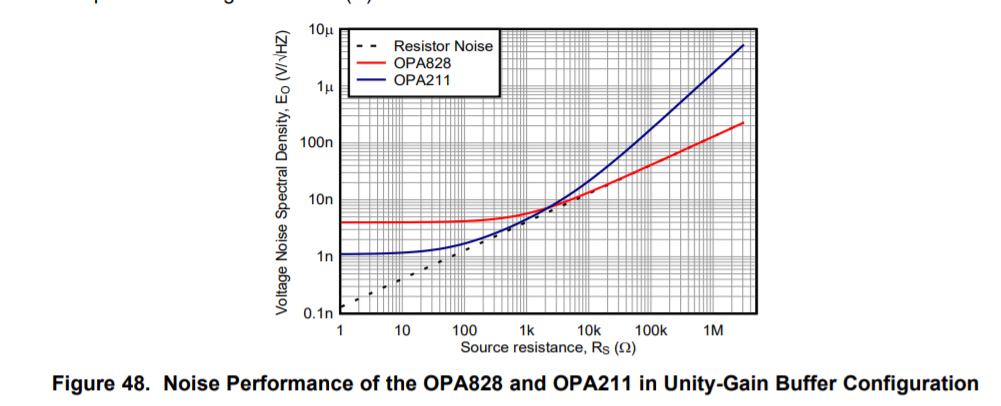
为了实现更好的电压噪声、如果 输入噪声电流乘以源电阻比输入电压噪声低几倍、则可以并联连接放大器。
对于用于电压增益的放大器、这并不是一件大事、因为用户只需构建两个或更多相同的放大器、直接连接其输入并通过相同的电阻器将其输出连接到公共输出、 它负责对两个或更多放大器输出求平均值并限制由不同偏移电压引起的放大器输出之间的电流。
由于放大器仅共享一个输入端子、因此其第二个输入端子可以稳定至不同的电压、因此放大器之间的输出失调电压通常只是输入失调电压乘以电压增益。
现在、在采用跨阻放大器配置的情况下、所有放大器将共享两个输入端子、这将导致机器人输出进入相反的电源轨、除非输入失调电压完全相同。
在互阻抗配置中实现放大器并联是否有好方法? 我想用一个慢速伺服环路来抵消其中一个放大器的同相输入、从而使输出差值归零、但是由于我的信号频率可能非常低、环路必须非常慢。
感谢您的任何输入。
此致、
格尔德