

Other Parts Discussed in Thread: TLV1805
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TLV1805 主题中讨论的其他器件:TIDA-010071、
你(们)好
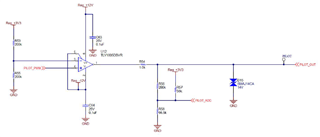
我的应用是参考 TIDA-010071文档的交流充电桩。 因此 、我们的解决方案是将 TLV1805用于控制导向信号。
我的问题是
- 如果 引脚3和引脚4为0V,那么仿真和测量之间 TLV1805的输出(PIN1) V 为何不同。 仿真的输出 V 为12V,但实际测量值为+12V 至-12 4kHz 波形
-
- 什么是正确状态
- TLV1805的参数导致此问题的原因,如 Vos……
谢谢
