This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
Other Parts Discussed in Thread: INA240, INA193
https://e2e.ti.com/support/amplifiers-group/amplifiers/f/amplifiers-forum/702644/faq-ina240-how-to-understand-the-bandwidth-specification
如何了解带宽规格及其如何应用于我的 PWM 控制信号
INA240采用类似于传统斩波稳定放大器的新型架构、主要目的是最大限度地减小低频误差和漂移、同时在 PWM 环境中实现内联电流感应。 因此、INA240具有出色的 PWM 抑制、直流精度和温度漂移。
在了解以下参数之间的关系时、偶尔会遇到一些问题:
这篇文章将试图对这些领域作一些说明。
PWM 频率和占空比
在 BLDC 电机控制中、需要逐周期监控绕组电流。 PWM 转换后、电流感应放大器的稳定速度越快、控制器根据电流测量做出决策的速度就越快。 PWM 的两个参数立即生效、即(1) PWM 频率和(2) PWM 占空比。
有时有人会问、为什么我不能在100KHz PWM 应用中使用带宽为100KHz 的电流分流监控器(CSM)? 这不是简单的"是/否"答案、而是取决于与所涉及 PWM 信号的频率和占空比相关的精度要求和稳定时间。
使用相同的100KHz PWM 示例,假设其占空比为50%。 在每个 PWM 转换后、电流通常发生变化、因此 CSM 必须稳定至新的差分输入。 CSM 实际上被提供一个基频为200kHz 的输入信号。 在进行下一次测量之前、CSM 最多有5uS 的工作电压、而不是10uS 的工作电压。 在5uS 期间、CSM 必须放大差分输入、同时稳定共模干扰。
当占空比发生变化时、这种情况可能会更具挑战性。 采用相同的100KHz PWM 信号、如果占空比为25%、则工作时间从5uS 减少到2.5uS。
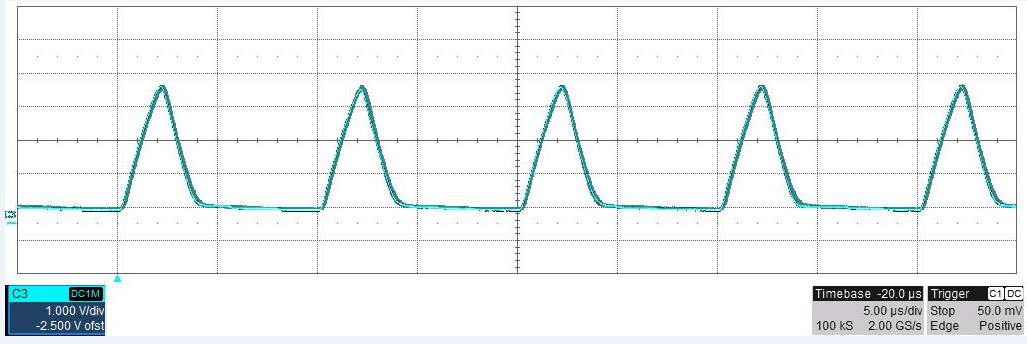
为了说明占空比的影响、一个具有两个不同占空比的100KHz 差分输入被传递到同一个 CSM、下面显示了响应图。 尽管在现实中、电机向 CSM 提供的差分输入很少是方波。
图2阶跃响应、100KHz 和80%占空比
INA240带宽(-3dB 频率)
带宽(BW)定义为半功率点、即输出功率降至峰值一半的频率。 它也称为-3dB 频率。
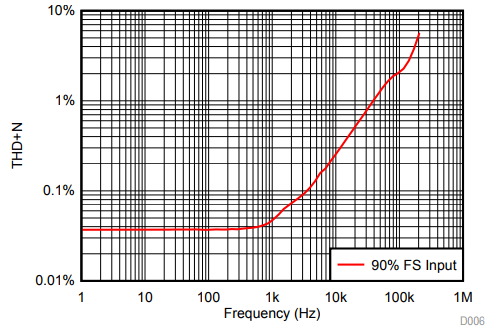
INA240的压摆率相对较高、为2V/us;带宽相对较宽、为400kHz。 在100KHz 时、THDN 约为2%、在带宽的较高部分快速增加、如下图所示。
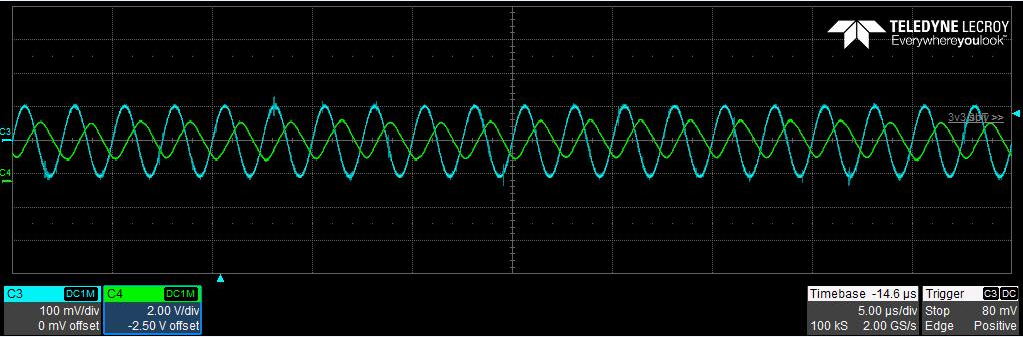
下面是400kHz 正弦输入的时域图、由 INA240A1放大。 输出仍然具有一半的峰值功率、但波形开始看起来更像是三角形、而不是正弦波。
INA240稳定时间
在 INA240电气特性表中、稳定时间通常显示为9.6uS、精度为0.5%;这是在2V 输出阶跃下测试的。
如果放宽精度要求、可显著缩短稳定时间。 例如、精度为1%时、稳定时间通常为5uS。
INA240采用独特的偏移消除拓扑、可实现出色的 PWM 共模抑制和出色的直流精度。 这是以较慢的差分稳定和较高频率下更大的失真为代价的。
在内部、偏移消除在400kHz (2.5uS 周期)时钟上运行。 差分输入的变化将需要对几个此类时钟周期进行采样和放大。 如果输入相对于该时钟而言较慢、则偏移消除算法必须始终跟上它的速度、速度为每2.5uS。
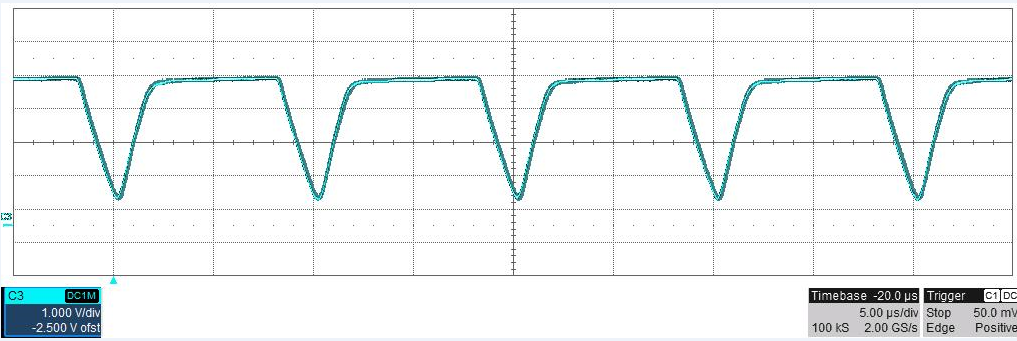
这就是为什么响应曲线中有“阶跃”或“波形”,而不是传统线性放大器。
很明显,这个时钟相对于外部世界提供的输入是异步的;这就是为什么“阶跃”或“波形”会根据输入和时钟的相对计时发生变化的原因。 相同的偏移消除方案也会导致较高频率下的失真
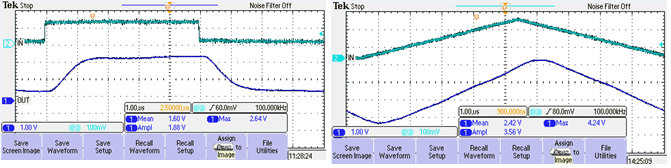
图5 INA240差分阶跃和斜升响应
结论
INA240专为 PWM 应用而设计、是电机内联感应的理想选择。 在考虑使用 INA240进行此类应用时、应权衡多个参数以确定其是否匹配。 这些参数包括 PWM 频率、占空比和稳定要求。
TI 对应用帮助或客户产品设计不做任何保证和义务。 您对与您的产品相关的所有设计决策和工程、包括与 TI 产品应用相关的决策负全部责任。 通过提供技术信息、TI 不打算提供或提供有关您的设计的工程服务或建议。