Other Parts Discussed in Thread: SYSCONFIG, INA237, INA238, INA228
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:INA237 主题中讨论的其他器件: INA238、SysConfig、 INA228
您好
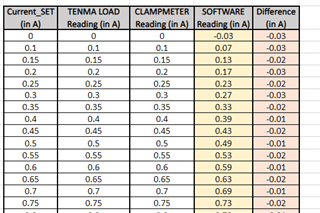
它显示了无负载时的电流-30 mA。 即使连接到负载、也能看到这种30mA 差异。 请查看以下详细信息。
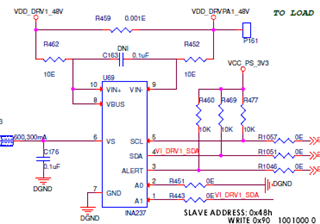
1) 1mE 分流电阻/5A 最大电流
请检查随附的代码
Google Git Sign in android / kernel / common / refs/heads/android-mainline / . / drivers / hwmon / ina238.c blob: ca9f5d2c811bb6ed0eb53f3ee1a3563c5c1d3b0f [file] [log] [blame] // SPDX-License-Identifier: GPL-2.0-only /* * Driver for Texas Instruments INA238 power monitor chip * Datasheet: www.ti.com/.../ina238 * * Copyright (C) 2021 Nathan Rossi <nathan.rossi@digi.com> */ #include <linux/err.h> #include <linux/hwmon.h> #include <linux/i2c.h> #include <linux/init.h> #include <linux/kernel.h> #include <linux/module.h> #include <linux/of.h> #include <linux/regmap.h> #include <linux/platform_data/ina2xx.h> /* INA238 register definitions */ #define INA238_CONFIG 0x0 #define INA238_ADC_CONFIG 0x1 #define INA238_SHUNT_CALIBRATION 0x2 #define INA238_SHUNT_VOLTAGE 0x4 #define INA238_BUS_VOLTAGE 0x5 #define INA238_DIE_TEMP 0x6 #define INA238_CURRENT 0x7 #define INA238_POWER 0x8 #define INA238_DIAG_ALERT 0xb #define INA238_SHUNT_OVER_VOLTAGE 0xc #define INA238_SHUNT_UNDER_VOLTAGE 0xd #define INA238_BUS_OVER_VOLTAGE 0xe #define INA238_BUS_UNDER_VOLTAGE 0xf #define INA238_TEMP_LIMIT 0x10 #define INA238_POWER_LIMIT 0x11 #define INA238_DEVICE_ID 0x3f /* not available on INA237 */ #define INA238_CONFIG_ADCRANGE BIT(4) #define INA238_DIAG_ALERT_TMPOL BIT(7) #define INA238_DIAG_ALERT_SHNTOL BIT(6) #define INA238_DIAG_ALERT_SHNTUL BIT(5) #define INA238_DIAG_ALERT_BUSOL BIT(4) #define INA238_DIAG_ALERT_BUSUL BIT(3) #define INA238_DIAG_ALERT_POL BIT(2) #define INA238_REGISTERS 0x11 #define INA238_RSHUNT_DEFAULT 10000 /* uOhm */ /* Default configuration of device on reset. */ #define INA238_CONFIG_DEFAULT 0 /* 16 sample averaging, 1052us conversion time, continuous mode */ #define INA238_ADC_CONFIG_DEFAULT 0xfb6a /* Configure alerts to be based on averaged value (SLOWALERT) */ #define INA238_DIAG_ALERT_DEFAULT 0x2000 /* * This driver uses a fixed calibration value in order to scale current/power * based on a fixed shunt resistor value. This allows for conversion within the * device to avoid integer limits whilst current/power accuracy is scaled * relative to the shunt resistor value within the driver. This is similar to * how the ina2xx driver handles current/power scaling. * * The end result of this is that increasing shunt values (from a fixed 20 mOhm * shunt) increase the effective current/power accuracy whilst limiting the * range and decreasing shunt values decrease the effective accuracy but * increase the range. * * The value of the Current register is calculated given the following: * Current (A) = (shunt voltage register * 5) * calibration / 81920 * * The maximum shunt voltage is 163.835 mV (0x7fff, ADC_RANGE = 0, gain = 4). * With the maximum current value of 0x7fff and a fixed shunt value results in * a calibration value of 16384 (0x4000). * * 0x7fff = (0x7fff * 5) * calibration / 81920 * calibration = 0x4000 * * Equivalent calibration is applied for the Power register (maximum value for * bus voltage is 102396.875 mV, 0x7fff), where the maximum power that can * occur is ~16776192 uW (register value 0x147a8): * * This scaling means the resulting values for Current and Power registers need * to be scaled by the difference between the fixed shunt resistor and the * actual shunt resistor: * * shunt = 0x4000 / (819.2 * 10^6) / 0.001 = 20000 uOhms (with 1mA/lsb) * * Current (mA) = register value * 20000 / rshunt / 4 * gain * Power (W) = 0.2 * register value * 20000 / rshunt / 4 * gain */ #define INA238_CALIBRATION_VALUE 16384 #define INA238_FIXED_SHUNT 20000 #define INA238_SHUNT_VOLTAGE_LSB 5 /* 5 uV/lsb */ #define INA238_BUS_VOLTAGE_LSB 3125 /* 3.125 mV/lsb */ #define INA238_DIE_TEMP_LSB 125 /* 125 mC/lsb */ static struct regmap_config ina238_regmap_config = { .max_register = INA238_REGISTERS, .reg_bits = 8, .val_bits = 16, }; struct ina238_data { struct i2c_client *client; struct mutex config_lock; struct regmap *regmap; u32 rshunt; int gain; }; static int ina238_read_reg24(const struct i2c_client *client, u8 reg, u32 *val) { u8 data[3]; int err; /* 24-bit register read */ err = i2c_smbus_read_i2c_block_data(client, reg, 3, data); if (err < 0) return err; if (err != 3) return -EIO; *val = (data[0] << 16) | (data[1] << 8) | data[2]; return 0; } static int ina238_read_in(struct device *dev, u32 attr, int channel, long *val) { struct ina238_data *data = dev_get_drvdata(dev); int reg, mask; int regval; int err; switch (channel) { case 0: switch (attr) { case hwmon_in_input: reg = INA238_SHUNT_VOLTAGE; break; case hwmon_in_max: reg = INA238_SHUNT_OVER_VOLTAGE; break; case hwmon_in_min: reg = INA238_SHUNT_UNDER_VOLTAGE; break; case hwmon_in_max_alarm: reg = INA238_DIAG_ALERT; mask = INA238_DIAG_ALERT_SHNTOL; break; case hwmon_in_min_alarm: reg = INA238_DIAG_ALERT; mask = INA238_DIAG_ALERT_SHNTUL; break; default: return -EOPNOTSUPP; } break; case 1: switch (attr) { case hwmon_in_input: reg = INA238_BUS_VOLTAGE; break; case hwmon_in_max: reg = INA238_BUS_OVER_VOLTAGE; break; case hwmon_in_min: reg = INA238_BUS_UNDER_VOLTAGE; break; case hwmon_in_max_alarm: reg = INA238_DIAG_ALERT; mask = INA238_DIAG_ALERT_BUSOL; break; case hwmon_in_min_alarm: reg = INA238_DIAG_ALERT; mask = INA238_DIAG_ALERT_BUSUL; break; default: return -EOPNOTSUPP; } break; default: return -EOPNOTSUPP; } err = regmap_read(data->regmap, reg, ®val); if (err < 0) return err; switch (attr) { case hwmon_in_input: case hwmon_in_max: case hwmon_in_min: /* signed register, value in mV */ regval = (s16)regval; if (channel == 0) /* gain of 1 -> LSB / 4 */ *val = (regval * INA238_SHUNT_VOLTAGE_LSB) / (1000 * (4 - data->gain + 1)); else *val = (regval * INA238_BUS_VOLTAGE_LSB) / 1000; break; case hwmon_in_max_alarm: case hwmon_in_min_alarm: *val = !!(regval & mask); break; } return 0; } static int ina238_write_in(struct device *dev, u32 attr, int channel, long val) { struct ina238_data *data = dev_get_drvdata(dev); int regval; if (attr != hwmon_in_max && attr != hwmon_in_min) return -EOPNOTSUPP; /* convert decimal to register value */ switch (channel) { case 0: /* signed value, clamp to max range +/-163 mV */ regval = clamp_val(val, -163, 163); regval = (regval * 1000 * (4 - data->gain + 1)) / INA238_SHUNT_VOLTAGE_LSB; regval = clamp_val(regval, S16_MIN, S16_MAX); switch (attr) { case hwmon_in_max: return regmap_write(data->regmap, INA238_SHUNT_OVER_VOLTAGE, regval); case hwmon_in_min: return regmap_write(data->regmap, INA238_SHUNT_UNDER_VOLTAGE, regval); default: return -EOPNOTSUPP; } case 1: /* signed value, positive values only. Clamp to max 102.396 V */ regval = clamp_val(val, 0, 102396); regval = (regval * 1000) / INA238_BUS_VOLTAGE_LSB; regval = clamp_val(regval, 0, S16_MAX); switch (attr) { case hwmon_in_max: return regmap_write(data->regmap, INA238_BUS_OVER_VOLTAGE, regval); case hwmon_in_min: return regmap_write(data->regmap, INA238_BUS_UNDER_VOLTAGE, regval); default: return -EOPNOTSUPP; } default: return -EOPNOTSUPP; } } static int ina238_read_current(struct device *dev, u32 attr, long *val) { struct ina238_data *data = dev_get_drvdata(dev); int regval; int err; switch (attr) { case hwmon_curr_input: err = regmap_read(data->regmap, INA238_CURRENT, ®val); if (err < 0) return err; /* Signed register, fixed 1mA current lsb. result in mA */ *val = div_s64((s16)regval * INA238_FIXED_SHUNT * data->gain, data->rshunt * 4); break; default: return -EOPNOTSUPP; } return 0; } static int ina238_read_power(struct device *dev, u32 attr, long *val) { struct ina238_data *data = dev_get_drvdata(dev); long long power; int regval; int err; switch (attr) { case hwmon_power_input: err = ina238_read_reg24(data->client, INA238_POWER, ®val); if (err) return err; /* Fixed 1mA lsb, scaled by 1000000 to have result in uW */ power = div_u64(regval * 1000ULL * INA238_FIXED_SHUNT * data->gain, 20 * data->rshunt); /* Clamp value to maximum value of long */ *val = clamp_val(power, 0, LONG_MAX); break; case hwmon_power_max: err = regmap_read(data->regmap, INA238_POWER_LIMIT, ®val); if (err) return err; /* * Truncated 24-bit compare register, lower 8-bits are * truncated. Same conversion to/from uW as POWER register. */ power = div_u64((regval << 8) * 1000ULL * INA238_FIXED_SHUNT * data->gain, 20 * data->rshunt); /* Clamp value to maximum value of long */ *val = clamp_val(power, 0, LONG_MAX); break; case hwmon_power_max_alarm: err = regmap_read(data->regmap, INA238_DIAG_ALERT, ®val); if (err) return err; *val = !!(regval & INA238_DIAG_ALERT_POL); break; default: return -EOPNOTSUPP; } return 0; } static int ina238_write_power(struct device *dev, u32 attr, long val) { struct ina238_data *data = dev_get_drvdata(dev); long regval; if (attr != hwmon_power_max) return -EOPNOTSUPP; /* * Unsigned postive values. Compared against the 24-bit power register, * lower 8-bits are truncated. Same conversion to/from uW as POWER * register. */ regval = clamp_val(val, 0, LONG_MAX); regval = div_u64(val * 20ULL * data->rshunt, 1000ULL * INA238_FIXED_SHUNT * data->gain); regval = clamp_val(regval >> 8, 0, U16_MAX); return regmap_write(data->regmap, INA238_POWER_LIMIT, regval); } static int ina238_read_temp(struct device *dev, u32 attr, long *val) { struct ina238_data *data = dev_get_drvdata(dev); int regval; int err; switch (attr) { case hwmon_temp_input: err = regmap_read(data->regmap, INA238_DIE_TEMP, ®val); if (err) return err; /* Signed, bits 15-4 of register, result in mC */ *val = ((s16)regval >> 4) * INA238_DIE_TEMP_LSB; break; case hwmon_temp_max: err = regmap_read(data->regmap, INA238_TEMP_LIMIT, ®val); if (err) return err; /* Signed, bits 15-4 of register, result in mC */ *val = ((s16)regval >> 4) * INA238_DIE_TEMP_LSB; break; case hwmon_temp_max_alarm: err = regmap_read(data->regmap, INA238_DIAG_ALERT, ®val); if (err) return err; *val = !!(regval & INA238_DIAG_ALERT_TMPOL); break; default: return -EOPNOTSUPP; } return 0; } static int ina238_write_temp(struct device *dev, u32 attr, long val) { struct ina238_data *data = dev_get_drvdata(dev); int regval; if (attr != hwmon_temp_max) return -EOPNOTSUPP; /* Signed, bits 15-4 of register */ regval = (val / INA238_DIE_TEMP_LSB) << 4; regval = clamp_val(regval, S16_MIN, S16_MAX) & 0xfff0; return regmap_write(data->regmap, INA238_TEMP_LIMIT, regval); } static int ina238_read(struct device *dev, enum hwmon_sensor_types type, u32 attr, int channel, long *val) { switch (type) { case hwmon_in: return ina238_read_in(dev, attr, channel, val); case hwmon_curr: return ina238_read_current(dev, attr, val); case hwmon_power: return ina238_read_power(dev, attr, val); case hwmon_temp: return ina238_read_temp(dev, attr, val); default: return -EOPNOTSUPP; } return 0; } static int ina238_write(struct device *dev, enum hwmon_sensor_types type, u32 attr, int channel, long val) { struct ina238_data *data = dev_get_drvdata(dev); int err; mutex_lock(&data->config_lock); switch (type) { case hwmon_in: err = ina238_write_in(dev, attr, channel, val); break; case hwmon_power: err = ina238_write_power(dev, attr, val); break; case hwmon_temp: err = ina238_write_temp(dev, attr, val); break; default: err = -EOPNOTSUPP; break; } mutex_unlock(&data->config_lock); return err; } static umode_t ina238_is_visible(const void *drvdata, enum hwmon_sensor_types type, u32 attr, int channel) { switch (type) { case hwmon_in: switch (attr) { case hwmon_in_input: case hwmon_in_max_alarm: case hwmon_in_min_alarm: return 0444; case hwmon_in_max: case hwmon_in_min: return 0644; default: return 0; } case hwmon_curr: switch (attr) { case hwmon_curr_input: return 0444; default: return 0; } case hwmon_power: switch (attr) { case hwmon_power_input: case hwmon_power_max_alarm: return 0444; case hwmon_power_max: return 0644; default: return 0; } case hwmon_temp: switch (attr) { case hwmon_temp_input: case hwmon_temp_max_alarm: return 0444; case hwmon_temp_max: return 0644; default: return 0; } default: return 0; } } #define INA238_HWMON_IN_CONFIG (HWMON_I_INPUT | \ HWMON_I_MAX | HWMON_I_MAX_ALARM | \ HWMON_I_MIN | HWMON_I_MIN_ALARM) static const struct hwmon_channel_info * const ina238_info[] = { HWMON_CHANNEL_INFO(in, /* 0: shunt voltage */ INA238_HWMON_IN_CONFIG, /* 1: bus voltage */ INA238_HWMON_IN_CONFIG), HWMON_CHANNEL_INFO(curr, /* 0: current through shunt */ HWMON_C_INPUT), HWMON_CHANNEL_INFO(power, /* 0: power */ HWMON_P_INPUT | HWMON_P_MAX | HWMON_P_MAX_ALARM), HWMON_CHANNEL_INFO(temp, /* 0: die temperature */ HWMON_T_INPUT | HWMON_T_MAX | HWMON_T_MAX_ALARM), NULL }; static const struct hwmon_ops ina238_hwmon_ops = { .is_visible = ina238_is_visible, .read = ina238_read, .write = ina238_write, }; static const struct hwmon_chip_info ina238_chip_info = { .ops = &ina238_hwmon_ops, .info = ina238_info, }; static int ina238_probe(struct i2c_client *client) { struct ina2xx_platform_data *pdata = dev_get_platdata(&client->dev); struct device *dev = &client->dev; struct device *hwmon_dev; struct ina238_data *data; int config; int ret; data = devm_kzalloc(dev, sizeof(*data), GFP_KERNEL); if (!data) return -ENOMEM; data->client = client; mutex_init(&data->config_lock); data->regmap = devm_regmap_init_i2c(client, &ina238_regmap_config); if (IS_ERR(data->regmap)) { dev_err(dev, "failed to allocate register map\n"); return PTR_ERR(data->regmap); } /* load shunt value */ data->rshunt = INA238_RSHUNT_DEFAULT; if (device_property_read_u32(dev, "shunt-resistor", &data->rshunt) < 0 && pdata) data->rshunt = pdata->shunt_uohms; if (data->rshunt == 0) { dev_err(dev, "invalid shunt resister value %u\n", data->rshunt); return -EINVAL; } /* load shunt gain value */ if (device_property_read_u32(dev, "ti,shunt-gain", &data->gain) < 0) data->gain = 4; /* Default of ADCRANGE = 0 */ if (data->gain != 1 && data->gain != 4) { dev_err(dev, "invalid shunt gain value %u\n", data->gain); return -EINVAL; } /* Setup CONFIG register */ config = INA238_CONFIG_DEFAULT; if (data->gain == 1) config |= INA238_CONFIG_ADCRANGE; /* ADCRANGE = 1 is /1 */ ret = regmap_write(data->regmap, INA238_CONFIG, config); if (ret < 0) { dev_err(dev, "error configuring the device: %d\n", ret); return -ENODEV; } /* Setup ADC_CONFIG register */ ret = regmap_write(data->regmap, INA238_ADC_CONFIG, INA238_ADC_CONFIG_DEFAULT); if (ret < 0) { dev_err(dev, "error configuring the device: %d\n", ret); return -ENODEV; } /* Setup SHUNT_CALIBRATION register with fixed value */ ret = regmap_write(data->regmap, INA238_SHUNT_CALIBRATION, INA238_CALIBRATION_VALUE); if (ret < 0) { dev_err(dev, "error configuring the device: %d\n", ret); return -ENODEV; } /* Setup alert/alarm configuration */ ret = regmap_write(data->regmap, INA238_DIAG_ALERT, INA238_DIAG_ALERT_DEFAULT); if (ret < 0) { dev_err(dev, "error configuring the device: %d\n", ret); return -ENODEV; } hwmon_dev = devm_hwmon_device_register_with_info(dev, client->name, data, &ina238_chip_info, NULL); if (IS_ERR(hwmon_dev)) return PTR_ERR(hwmon_dev); dev_info(dev, "power monitor %s (Rshunt = %u uOhm, gain = %u)\n", client->name, data->rshunt, data->gain); return 0; } static const struct i2c_device_id ina238_id[] = { { "ina238", 0 }, { } }; MODULE_DEVICE_TABLE(i2c, ina238_id); static const struct of_device_id __maybe_unused ina238_of_match[] = { { .compatible = "ti,ina237" }, { .compatible = "ti,ina238" }, { }, }; MODULE_DEVICE_TABLE(of, ina238_of_match); static struct i2c_driver ina238_driver = { .class = I2C_CLASS_HWMON, .driver = { .name = "ina238", .of_match_table = of_match_ptr(ina238_of_match), }, .probe = ina238_probe, .id_table = ina238_id, }; module_i2c_driver(ina238_driver); MODULE_AUTHOR("Nathan Rossi <nathan.rossi@digi.com>"); MODULE_DESCRIPTION("ina238 driver"); MODULE_LICENSE("GPL"); Powered by Gitiles| Privacy| Terms txt json
此致、
阿诺普