请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCU-PLUS-SDK AM243X 工具与软件:
尊敬的 TI 专家
根据 HEIDENHAIN 文档(D1128897 - 03 - A - 02 8)- 带有 EnDat 2.2和非 SAFE 的安全特性
EnDat 主设备
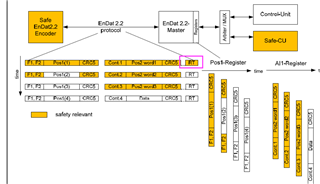
第3.5.2节 用于测量恢复时间 I 的计数器
例如、可以通过 EnDat 主器件内实现的计数器来测量恢复时间。 。
EnDat-Clock 时钟的最后一个上升沿(正信号)表示启动触发器和随后的下降
EnDat-Data 的边沿(正信号)表示恢复时间 I 计数器的停止触发。 (
必须在主器件内分析 EnDat 2.2协议以获得正确的触发时间。 还有电缆
必须考虑到延迟。)
计数器值必须在主机接口处的专用 RT 寄存器中提供。 。
计数器和 RT 寄存器必须在正常工作模式下动态更改以检测"停留"
计数器和 RT 寄存器的错误。 这可以通过不复位的计数器来实现。 因此、
恢复时间的预期值以最后值和当前值之间的差值进行编码。
最后的值必须存储在安全 CU 中。
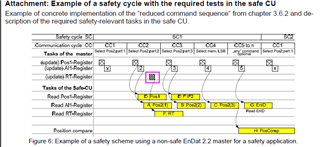
为了实现高效故障检测(尤其是对于多主器件)、需要加载的计数器
具有不同起始值的不同轴。 差值必须至少是预期容差的两倍
恢复时间的范围。 由于这一原因以及递增的值、因此强制进行动态采样
计数器不是必需的。
1) 1)第3.5.2节规定了 一个不会复位的计数器作为 RT 实现的一种方法、用于满足"停留在"检测要求。
我可以在 endat 接口中找到"Non reset RT counter"。
您是否 能够作为 endat 接口的一部分提供"非复位 RT 计数器"
谢谢你
艾伦一世