

Other Parts Discussed in Thread: MSPM0G3507, DRV8329
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSPM0G3507 主题中讨论的其他器件: DRV8329
工具与软件:
尊敬的 TI 专家:
我们根据 MSPM0无传感器 FOC 调优指南(修订版 B)的建议测量了 BEMF。
在此过程中、我们有一些问题。
如调优指南中所述、我们将要测量 BEMF 的电机轴与另一个电机连接、但没有为其供电、让其旋转。
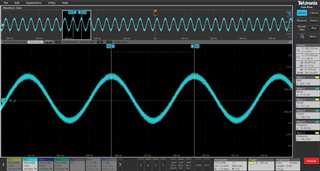
因此、结果的结果与波形类似。

我采用"测量电机任意两相的电压"来表示测量线间电压、但万一情况发生、我也测量了一相的电压。
黄色是一相(Va)上的电压、蓝色是线间电压(Va-Vb)。
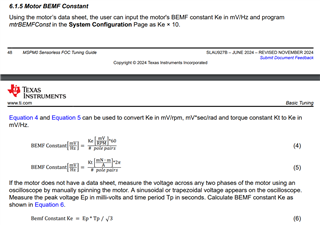
根据结果、如果 EP = 1150且 TP = 0.028479、并计算:
反电势常数 Ke = 1150* 0.028479/1.732 = 18.91、
BEMF 常数= 18.91*60/5 (极对)= 226.92
由于系统配置页面中的 mtrBEMFConst 为 Ke× 10、
获得 mtrBEMFConst = 226.92 * 10 = 2269.2。
它大约比示例代码中的 mtrBEMFConst 值(mspm0 sdk_2_03_00_07\examples\nortos\LP MSPM0G3507\motor_control_PMSM_sensorless_foc\sensorless-Foc DRV8329)高10倍。
此计算正确吗?

