

Other Parts Discussed in Thread: DRV8329, MSPM0G3507, MCF8329EVM
主题中讨论的其他器件: MCF8329EVM、DRV8329
工具与软件:
尊敬的专家:
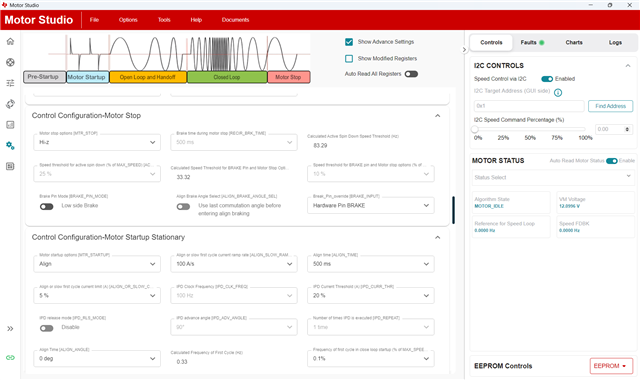
我在进行电机调优时遇到困难(使用 MSPM0G3507 MCU 的用户板)。
所以我尝试了将 MCF8329EVM 的自动调优结果应用于电机调优、但电机没有运行。
您能否告诉我、当我尝试将 MCF8329EVM 的自动调优结果输入到 MSPM0G3507时、是什么导致了问题?
MCF8329EVM 的电机控制算法与 MSPM0G3507的电机控制算法是否有差异?
如果有、请告诉我。
我将向您展示三个结果、以帮助您理解。
其中一项是 MCF8329EVM 上的自动调优结果、这使电机以1300 RPM 的转速旋转。



另一个是使用第三方 MCU 制作的用户板上1300 RPM 的结果。

我们不知道第三方 MCU 的算法设置、因此我们没有遵循此 MCU 的结果。
最后一个是使用 MSPM0G3507制造的用户板上1300 RPM 的结果。

如上所述、如果您输入 MCF8329的结果值、电机将不会运行、所以我们试验并输入使电机运行的值。
设置与此处说明的设置太不同、但如果您有任何帮助、我可以向您发送电子邮件。
我的问题是:
1.
MCF8329中的电机控制算法是否与应用于 MSPM0G3507示例的电机控制算法不同、例如 C:\ti\mspm0_sdk_2_03_00_07\examples\nortos\LP_MSPM0G3507\motor_control_universal_foc\universal-foc_DRV8329? 如果使用类似算法、则应该可以使用相同的值旋转、但不会旋转。
2.
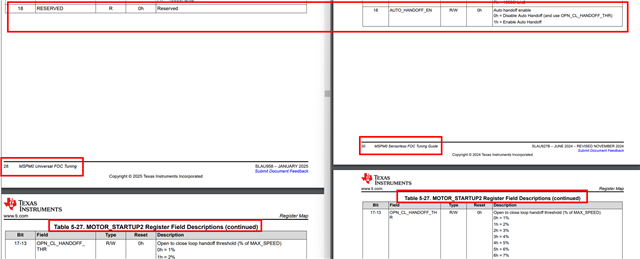
如果 MCF8329EVM 板在不使用 AUTO_HANDOFF_EN 的情况下自动调优、则波形不良。
因此、我尝试使用 AUTO_HANDOFF_EN、但 MSPM0G3507会受到 OPN_CL_HANDOFF_THR 的影响、即使 AUTO_HANDOFF_EN 设置为1也是如此。
寄存器设置为保留1、但通用模式不支持 AUTO_HANDOFF 吗?
我会等你的答复。
谢谢你。

