

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP-MSPM0G3519 工具/软件:
您好团队:
我们使用的是 "MCAL MSPM0_00.02.05.0_Internal"。
在集成 CAN 模块时、我们观察到无法通过配置在传统 CAN 和 FD CAN 之间进行选择。
另外,在静态代码中,我们遇到了以下代码:
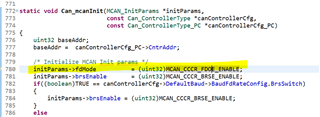
默认情况下、该代码会启用 CAN FD、并且用户无法选择传统 CAN。
此致、
Kiran
工具/软件:
您好团队:
我们使用的是 "MCAL MSPM0_00.02.05.0_Internal"。
在集成 CAN 模块时、我们观察到无法通过配置在传统 CAN 和 FD CAN 之间进行选择。
另外,在静态代码中,我们遇到了以下代码:
默认情况下、该代码会启用 CAN FD、并且用户无法选择传统 CAN。
此致、
Kiran
