Thread 中讨论的其他器件:MSPM0G3507、DRV8316、 SysConfig
工具/软件:
您好 TI、
在尝试将 DRV8316_EVM 与 MSPM0G3507 + SDK 2_04_00_06配合使用来运行 PMSM 电机时、我遇到以下问题:
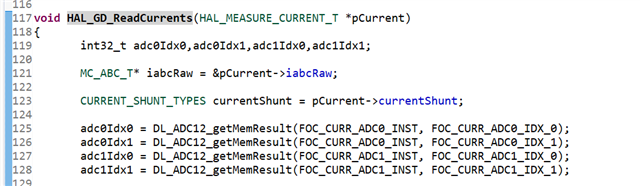
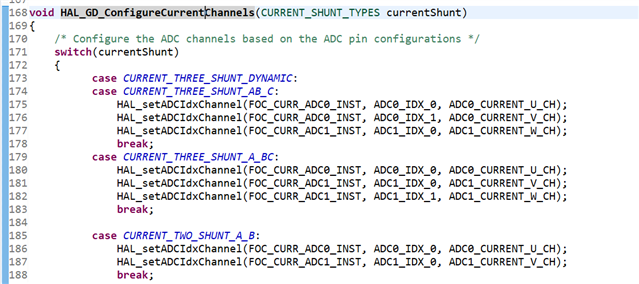
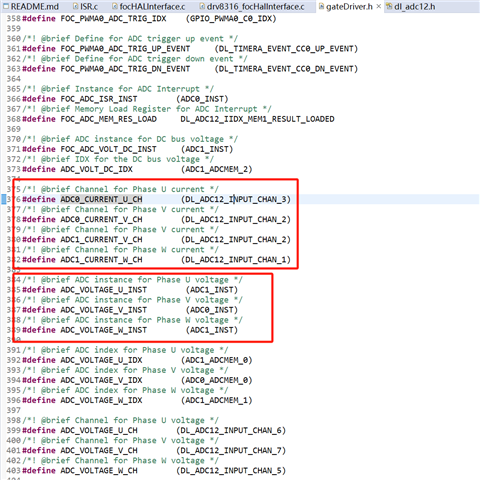
1-在 SysConfig 中、我无法在中看到用于电流检测的 ADC 配置。我只能看到配置的通道只有 ADC0_7、ADC1_6和 ADC1_3。
2 -"最大速度"系统参数是空载速度还是应计算的机械速度?
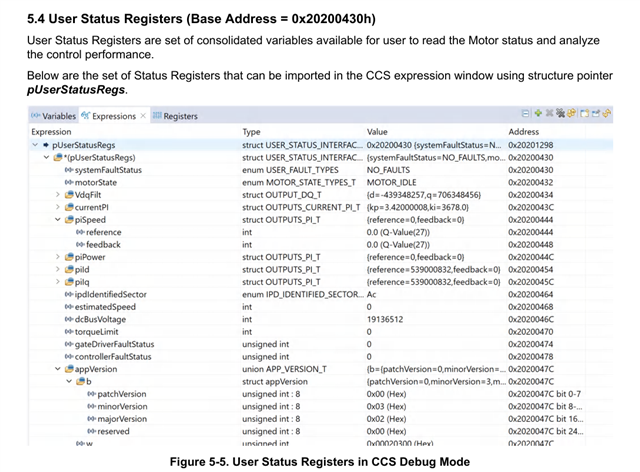
3-我可以在状态之间的转换中进行调试吗?例如、我无法调试在无传感器版本的代码中 motorState 变量的变化位置、因为某些库不是打开的代码吗?
4电机能够达到开环状态并在该状态下保持运行 、但每当我尝试进入闭环(closeLoopDis = 0) 时、它会在出现失速故障时停止(异常 EMF 锁定->这是唯一启用的锁定) 另外、我还观察到开环电流高于合理值、尽管我正在调整 OLilimit 、并使 Kp 和 Ki 参数设为0、并且确保手动测量反电动势、并将其乘以10、如手册中所述。
5-我需要在 GUI 中将 BaseVoltage 配置为44.59、或在 ISR.c 中配置为25.77。在默认情况下、应该 得到 MOTOR_VOLTAGE_BASE = 25.77、这将导致 pUserInputRegs->systemParams.voltageBase = MOTOR_VOLTAGE_BASE (即25.7)....... 而如果我在 GUI 中直接配置为44.59、则 pUserInputRegs->systemParams.voltageBase = 44.59
最后、MSPM0无传感器 FOC 调优指南中的正确基极电压公式 应为3.3V /( R2 /(R1 + R2))、即44.27 而不是 3.3V /( R1 /(R1 + R2)哪个是3.5 正确?
谢谢您、