

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSPM0G3507-Q1 工具/软件:
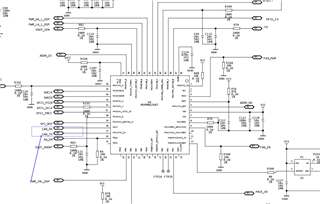

您好! 在调试 CAN 通信时、我遇到了 CAN_TX 始终保持在高电平的情况。 这是我的硬件设计。 我自己编写的程序可以在 TI 的演示板上正常通信。 如果在自行设计的电路板上使用、则无法实现通信、CAN_TX 始终保持在高电平。 请帮助分析上述电路设计是否存在任何问题、M0G3507芯片的 CAN 通信应注意哪些要点、以及提供了哪些故障排除方向。 谢谢!
