请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM2634 工具/软件:
CAN 采样点的配置存在几个问题、我想确认一下:
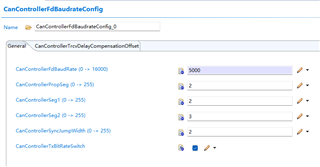
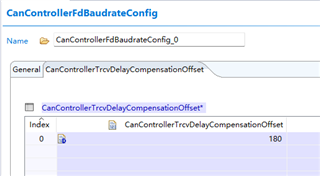
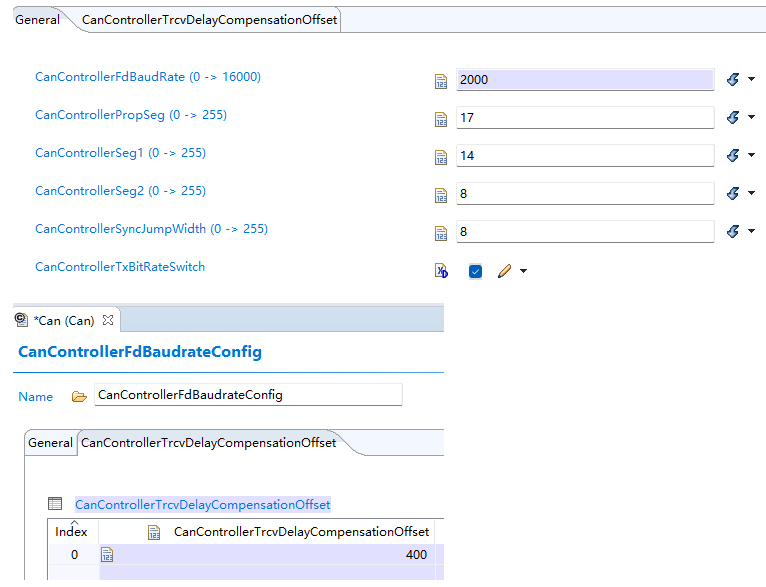
1、CANFD 的采样点数据段配置要求是采样点的80%。 在下图中、TQS 总数为40且 TDCO 为400的配置参数是否正确? 建议采用哪些配置?
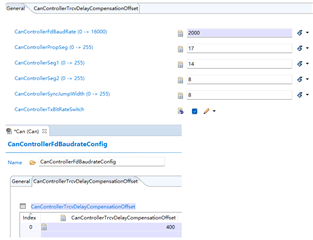
2.为什么 EB 中的配置,如上述配置,最多只能配置400个,并不意味着只能配置80%(400/500)个采样点。
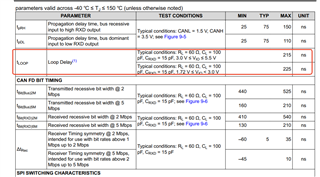
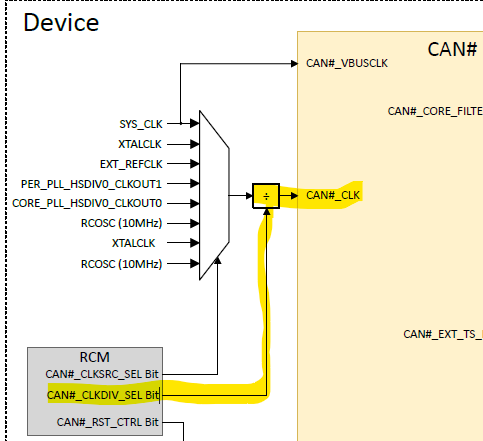
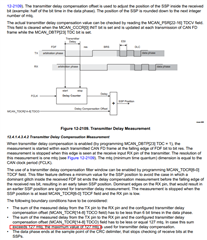
3.手册中二次采样点的描述如图所示,是否可以理解二次采样点分为两部分:自动测量的延迟计数器和 EB 配置中的 TDCO。 自动测量器件是否在 SSP 启用后立即启用它?
是否有方法测试配置的 TDCO? 如果第一个问题中的 TDCO 配置为200、会产生什么影响?