Other Parts Discussed in Thread: BOOSTXL-3PHGANINV, LVSERVOMTR
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM263P4 主题中讨论的其他器件:LVSERVOMTR
工具/软件:
您好、
我正在使用 AM263P LP、BOOSTXL-3phGANINV 和 LVSERVOMTR (Teknic M-2310P-LN-04K)。
我想使用 eSMO 观测器控制该电机。 当电机状态因 MOTOR_CL_RUNNING 而变化时、电机反向旋转过快。
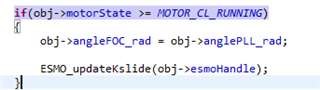
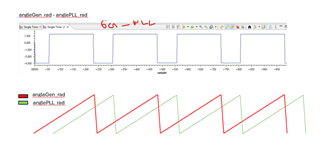
将 angleFOC_rad 更改为 anglePLL_rad。 当我比较 anglePLL_rad 和 angleGen_rad 信号时、可以看到 angleGen_rad 和 anglePLL_rad 之间存在相位差 。 电动机反转旋转的原因是什么?
我使用的器件((AM263P LP(从 AM263 移植)、BOOSTXL-3phGANINV 和 LVSERVOMTR (Teknic M-2310P-LN-04K) 在 UMC 上进行了验证。 它无法在 eSMO 中正常工作。 我使其在编码器中正常工作。