请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP-MSPM0G3519工具/软件:
您好团队:
我们集成了 CAN-FD 和“MCAL MSPM0_00.02.05.0_Internal“。
我们观察到 CANFD-TX 和 CANFD-RX 在运行时工作正常。
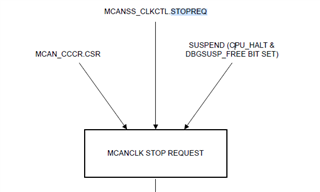
但是、如果我们应用断点、执行在断点处停止、或者我们停止执行一段时间、然后重新运行代码、
CANFD-TX 停止工作。 (我们观察到这未能减小 freeHwObjectCount、导致 CAN 驱动程序处于繁忙状态)
当代码运行正常而没有断点时、我们观察到寄存器 MCAN_TXBTO 正确更新、表示发生了 Tx 缓冲区传输。
代码执行在断点停止时的行为不确定。
恢复代码时、MCAN_TXBTO 不会更新、将值保留为 0。
此外、错误计数器开始递增、最终通信停止。
注意:我们已经使用 Trace32 和 CCS-XDS110 调试器观察到了这种行为。
如果您对此问题有任何见解或解决方案、我们将不胜感激。
此致、
Kiran