请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP-MSPM0G3507主题:SysConfig 中讨论的其他器件
工具/软件:
您好:
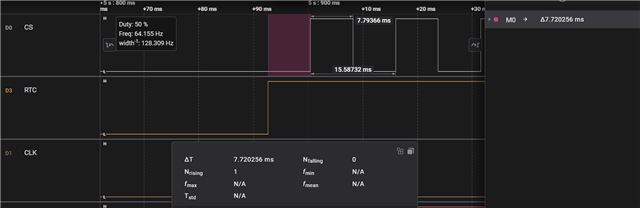
我已使用 RT1P0 预分频器并启用相应的 ISR 位将 RTC 配置为 15.6ms
我想重置此计时器并在另一个 ISR 例程中从 0 再次启动。 我找不到这个设置的任何特定寄存器。 您能在这里提供帮助吗?
此外、在运行期间、我想将 RTC 重新配置为 RT0P0 的另一个时间段是可能的。 我要注意的所有配置是什么?
我们有任何演示示示例吗?