Other Parts Discussed in Thread: TMS320F28388D, AM2634, AM263P4, C2000WARE
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM2634主题中讨论的其他器件:TMS320F28388D、 AM263P4和 C2000WARE
工具/软件:
您好:
我想比较的性能 TMS320F28388D 和 Sitara AM2634 理想之选。
目标是了解哪款器件更适合:
-
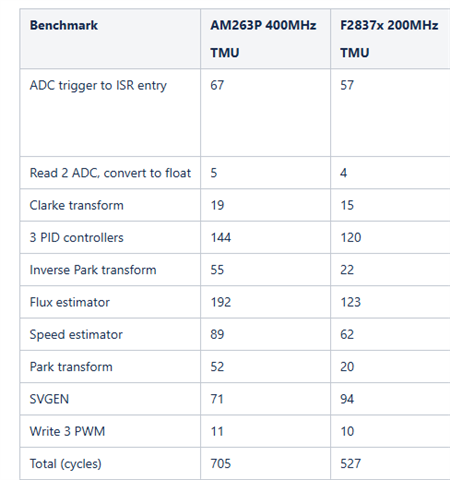
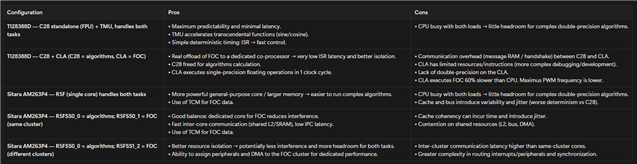
执行 磁场定向控制算法 稳定可靠。
-
仍然离开 足够的 CPU 余量 可运行额外的 双精度的复杂算法 。
我正在寻找关于如何建立这样一个基准的提示和最佳做法。
-
哪些参数与测量最相关?
-
您会推荐哪种方法?
-
是否有任何可以提供帮助的 TI 参考材料、现有基准测试或示例工程?
社区或 TI 专家提供的任何指导都会非常有帮助。
提前感谢!