请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: AM2431
尊敬的专家:
使用 PRU 读取和写入 I/O 时、我们注意到可能存在延迟。 请帮助确认此问题是否存在以及是否有任何解决方法。
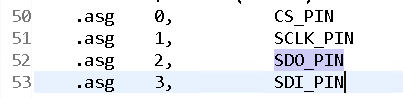
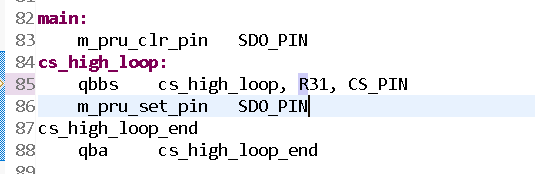
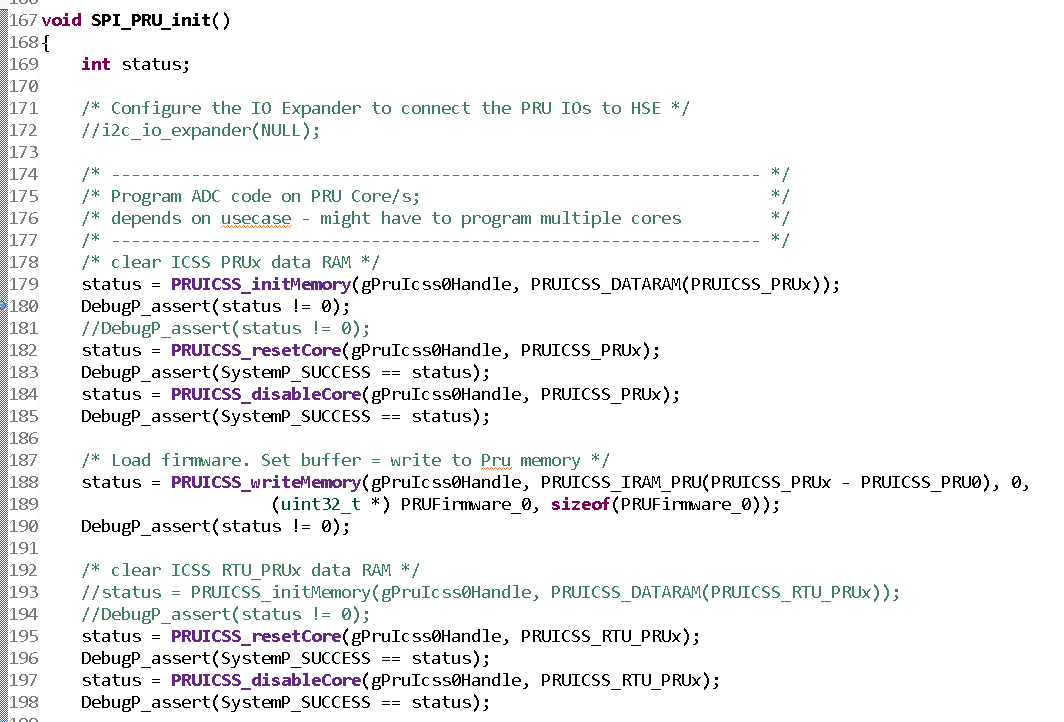
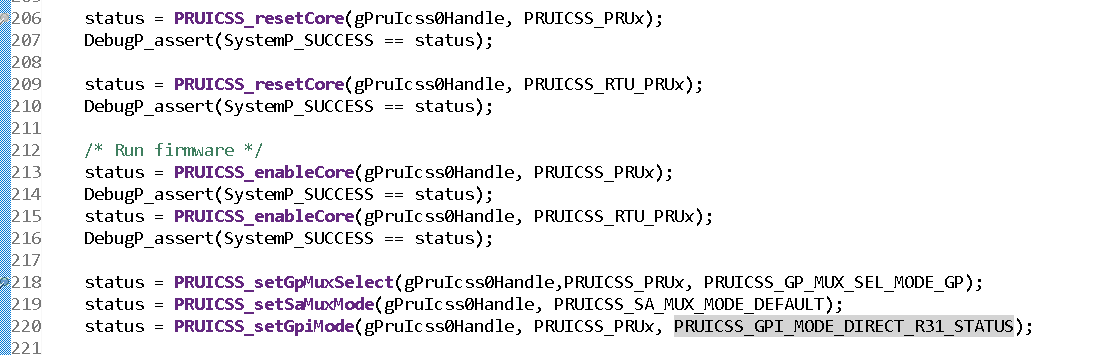
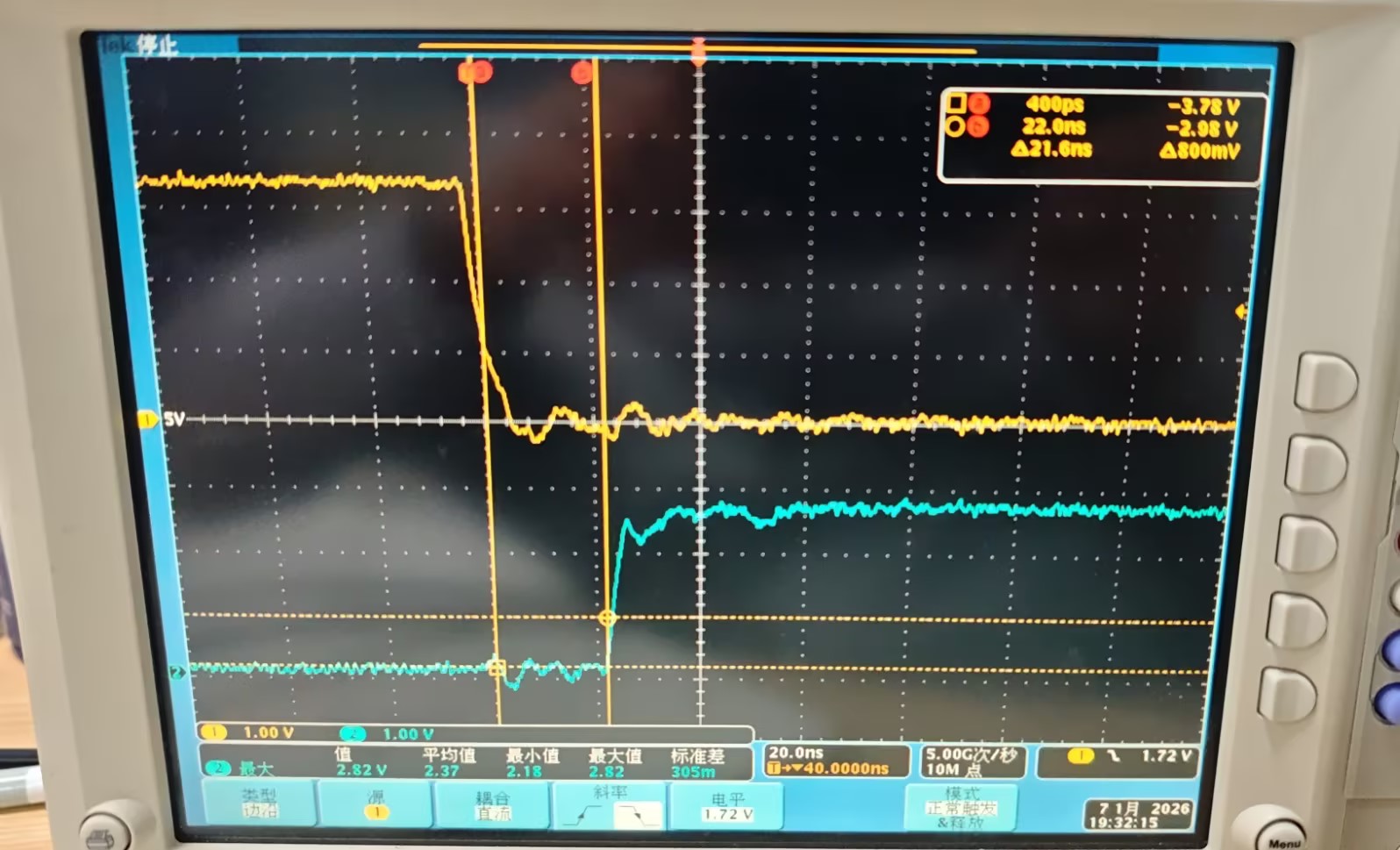
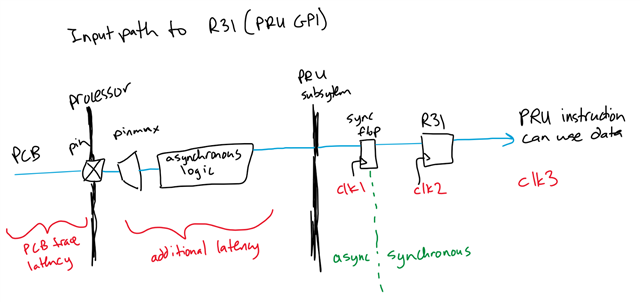
将 PRU 用作 SPI 从器件、在检测到 CS 的下降沿后、我们会将 SDO 拉高。 该代码仅包含两条指令、但 SDO 电平在 21ns 后上升。 电流测试表明 CS 引脚的检测延迟、就像 GPIO 输入引脚中存在延迟一样。
下面是测试代码和波形。