请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS570LS3137 “线程:测试”中讨论的其它部件
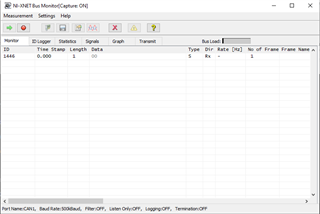
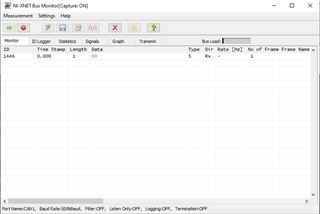
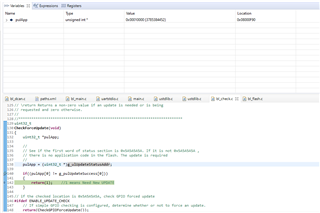
我正在尝试将以太网或 CAN 引导加载器示例调整为使用 TMS570LS3137DPGE 芯片的自定义板,但运气不好。 我在 CSS 中构建项目并刷新我的主板。 在这两个项目中,我一直关注调试器,直到它等待输入,但以太网和都无法响应外部 ping。
我正在尝试将以太网或 CAN 引导加载器示例调整为使用 TMS570LS3137DPGE 芯片的自定义板,但运气不好。 我在 CSS 中构建项目并刷新我的主板。 在这两个项目中,我一直关注调试器,直到它等待输入,但以太网和都无法响应外部 ping。