

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS570LS3137 大家好,
以下是客户提出的问题,可能需要您的帮助:
与其他设备一起调试,发现其他设备无法接收由于设备限制而快速连续传输的CAN消息。 因此,设备需要延迟发送每个ID的数据。 软件延迟,发现在传输特别频繁时,CAN信息的间隔没有预期的延迟。
问题:如何设置消息的两个帧之间的间隔?
您可以帮助检查此问题吗? 谢谢。
此致,
樱桃
大家好,
以下是客户提出的问题,可能需要您的帮助:
与其他设备一起调试,发现其他设备无法接收由于设备限制而快速连续传输的CAN消息。 因此,设备需要延迟发送每个ID的数据。 软件延迟,发现在传输特别频繁时,CAN信息的间隔没有预期的延迟。
问题:如何设置消息的两个帧之间的间隔?
您可以帮助检查此问题吗? 谢谢。
此致,
樱桃


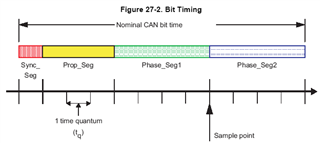 其中标称位时间Tb=1/can波特率
其中标称位时间Tb=1/can波特率