Other Parts Discussed in Thread: AM2632, UNIFLASH
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM2634 主题中讨论的其他器件:AM2632、 UNIFLASH
你(们)好。
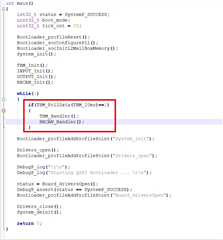
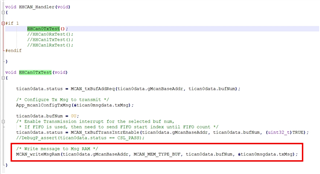
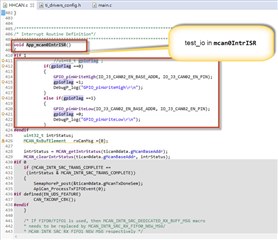
我想通过 AM2632上的 CAN 使用 SBL 单闪存启动功能,我们参考了 TI 支持的“SBL_QSPI”示例以添加 CAN 功能。 但我现在混淆了一个问题。 我们发现、该 API 将在一个任务周期中触发两次。 在本例中、我们创建一个10ms 任务来测试 CAN Tx 函数。 但是、当我们使用 CAN 工具检查行为时、该 MCAN-writeMsgRam 函数的操作错误。
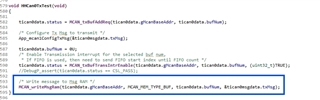
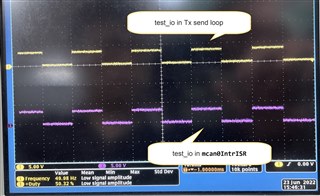
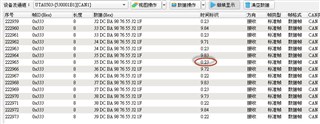
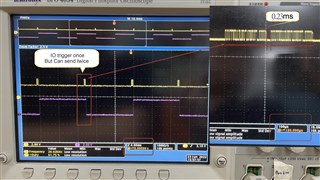
如下所示、它预计每10ms 发送一次。 因此、它会变得有点奇怪。 这两个发送时间为10ms。 换句话说、它必须在一个周期时间内被触发两次。 但这是错误的。

另一方面、我们尝试使用 XDS200进行实验、将.out 文件下载到 AM2632。 我们在 MCAN-writeMsgRam 函数上设置了一个断点、以便我们可以检查它在一个周期中是否确实执行了两次。 因此、在这种情况下、此函数被触发两次。 我们将胶片附在 YouTube 上。 www.youtube.com/watch

大家可以看看这个问题吗?
非常感谢